NORD Drivesystems BU0270 User Manual
Page 37
5 EtherCAT - Data transfer
BU 0270 GB
Subject to technical amendments
37
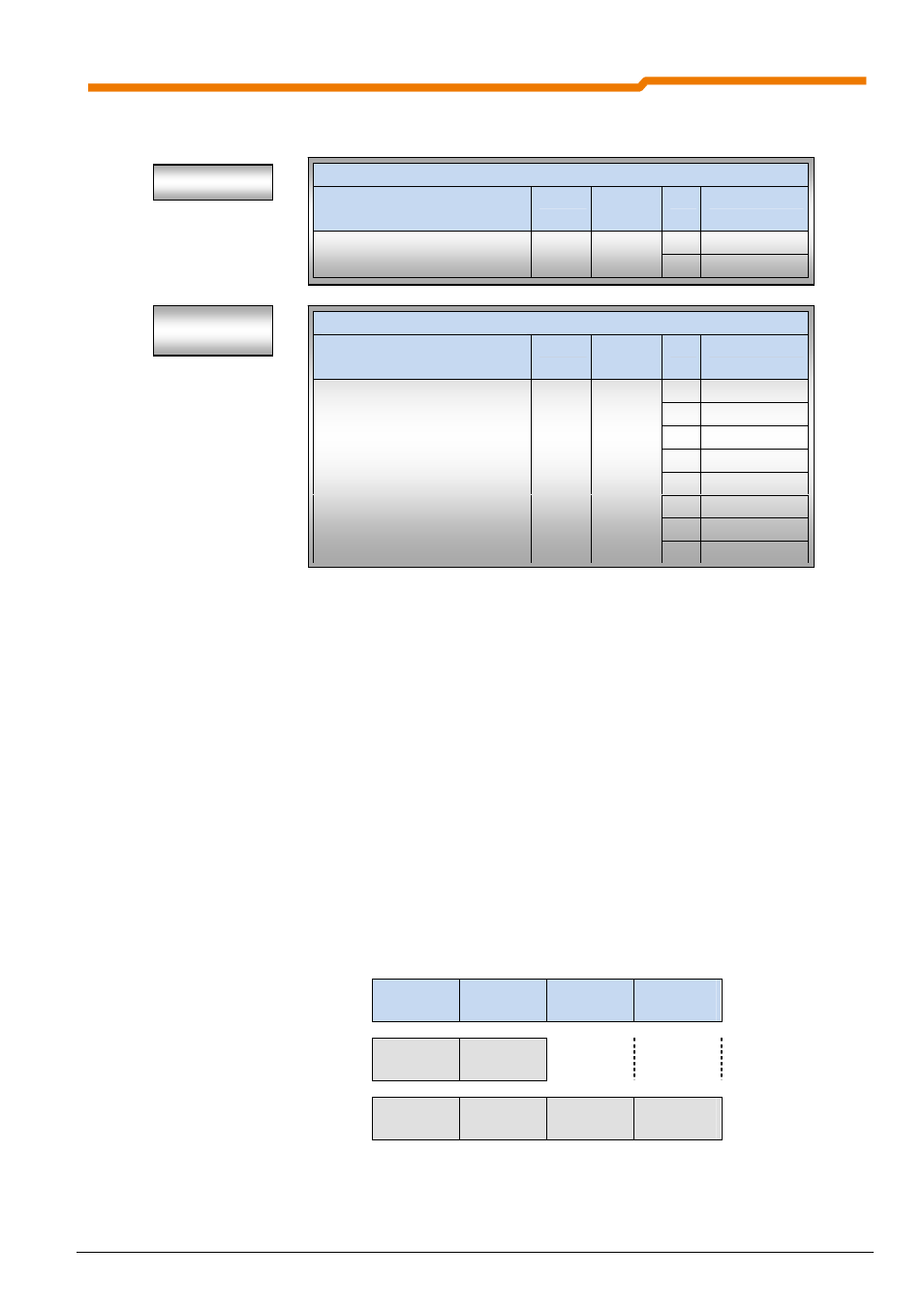
EtherCAT also enables direct access to the inputs and outputs of the BUS module. An example of the linking
of the relevant objects in the control unit is shown in the illustrations above.
5.2.1
Process data (PZD) in USS standard
In the process data area PZD, control words and setpoints or status words and actual values are transferred
from one participant to another. The sequence of the elements (Words (= 2 Bytes each)) in the structure of the
process data area is always the same.
The process data area of the reference data has the following structure:
-
STW:
Control Word; length 16 bit, order telegram
contains control bits (e.g. enable, rapid stop, error acknowledgement)
-
ZSW:
Status Word; length 16 bit, response telegram
contains status bits (e.g. FI running, fault)
-
SW1..3: Setpoints; maximum 3 possible, 16 or 32 bit, order telegram
e.g. frequency setpoint, position setpoint, torque setpoint
-
IW1..3:
Actual Values; maximum 3 possible, 16 or 32 bit, response telegram
e.g. actual frequency value, actual position value, actual torque value
1. Word
(Byte 0,1)
2. Word
(Byte 2,3)
3. Word
(Byte 4,5)
4. Word
(Byte 6,7)
PZD area with
1x16 bit setpoint
STW
ZSW
SW1
IW1
PZD area with up to 3
16 bit setpoints
STW
ZSW
SW1
IW1
SW2
IW2
SW3
IW3
Note: 32 bit setpoints (e.g.: positions) are not processed directly. They are assembled from two 16 Bit values
(High word = High part of a 32 Bit position setpoint and Low word = Low part of a 32 Bit position setpoint).
BUS - module
Actual value
- PDO in USS Protocol Mode
Sequence in telegram
Indication in word
Index
Sub-
Index
Bit
Description
0 Input
1
1 Input
2
2 Input
3
3 Input
4
4 Input
5
5 Input
6
6 Input
7
1 0x20B1
0
7 Input
8
BUS - module
Setpoint
- PDO in USS Protocol Mode
Sequence in telegram
Indication in word
Index
Sub-
Index
Bit
Description
0 Output
1
1 0x20B0
0
1 Output
2
PDO setpoint
Actual PDO
value