NORD Drivesystems BU0270 User Manual
Page 31
4 Commissioning
BU 0270 GB
Subject to technical amendments
31
4.2.2
Parameterisation of the SK 500E frequency inverter
The following settings must be made on the SK 500E:
• Control via "CANopen" P509 = 6
• Setpoints via "CANopen" P510 = 6 or 0 if P509 = 6
• Setting of setpoints via P546, P547 and P548
• Setting of actual values via P543, P544 and P545
• Setting of system bus monitoring via P513 = 0.6s
• Setting of the baud rate via P514 = 5 (corresponds to 250kB)
• Setting of the system bus addresses via P515 [-01] = 32, 34, 36 or 38
For a detailed description of the parameters, please refer to the SK 500E operating manual.
The parameters can be set with NORD parameterisation tools or via the EtherCAT master.
4.3 Integration into TwinCAT System Manager (Example) / Gateway mode
Via the bus module, up to four FIs and the bus module itself can be accessed (see also Section 8.3 "System
bus").
For parameter access, a differentiation is made between the FI and the bus module by means of different
parameter numbers or parameter groups. The parameters for the FI are categorised according to the
EtherCAT Modular Device Profiles.
The process data is sent to PDO objects. Each FI as well as the bus module has a separate PDO transmission
and reception object.
In the following, the integration of the SK TU4-ECT into the Beckhoff TwinCAT System Manager will be
explained. All modules must be connected and supplied with power.
• Insert the XML file with the name "NORD_TU4_ECT.xml" (www.nord.com) in the Control directory
• Reboot of TwinCAT in config. mode via
or Shift + F4
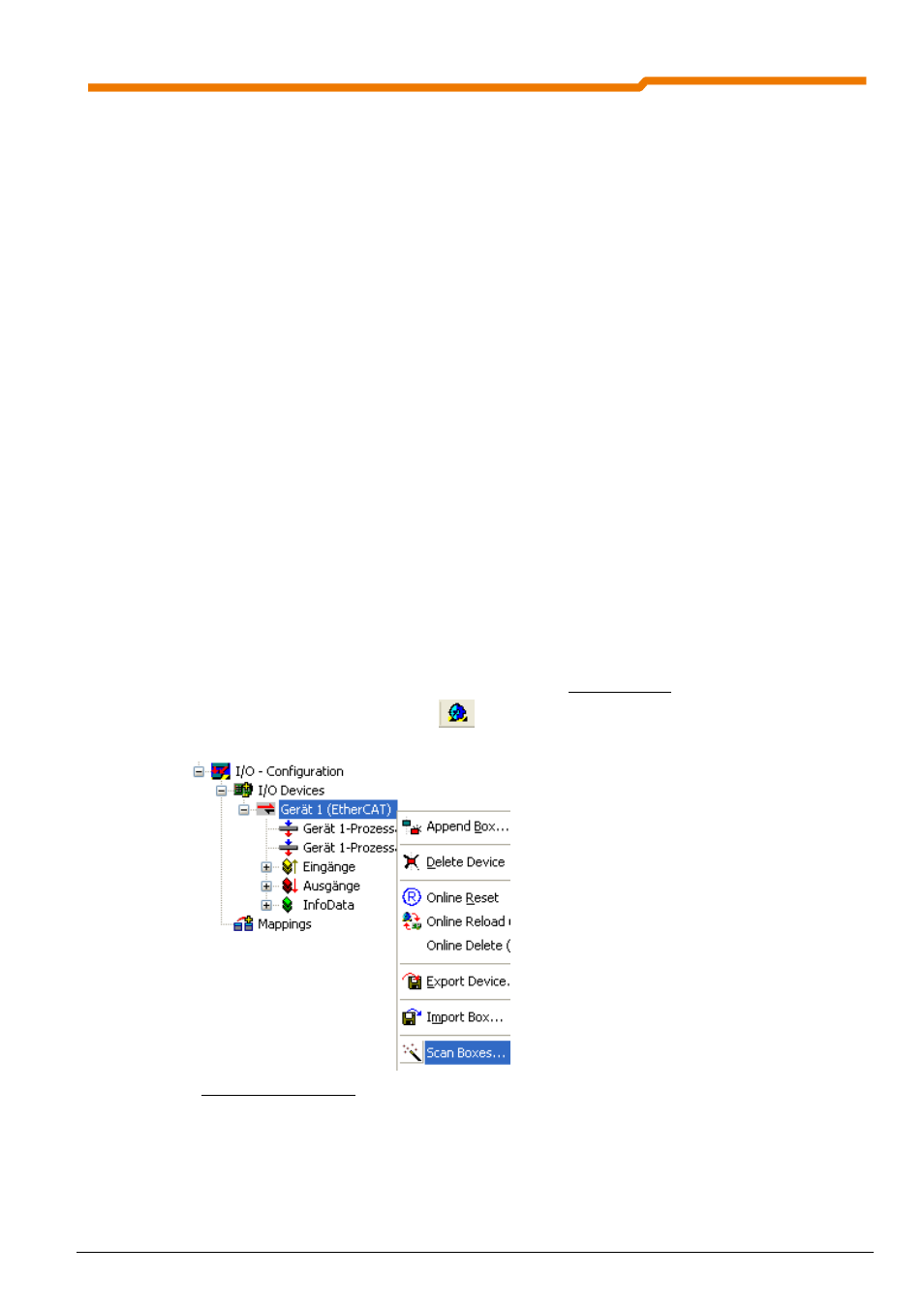
• Scan the EtherCAT bus for connected units. See following diagram
• The SK TU4-ECT modules which are found will be listed in the structural diagram
• The SK TU4-ECT can access up to 4 FIs and is equipped with 8 digital inputs and 2 digital outputs. In
the default setting of the configuration file, only the setting for FI 1 is loaded. All other FIs and the
Inputs/Outputs (modules) must be additionally added.
Scanning the EtherCAT bus