KROHNE TIDALFLUX IFM 4110 PF EN User Manual
Page 69
7.30830.32.00
69
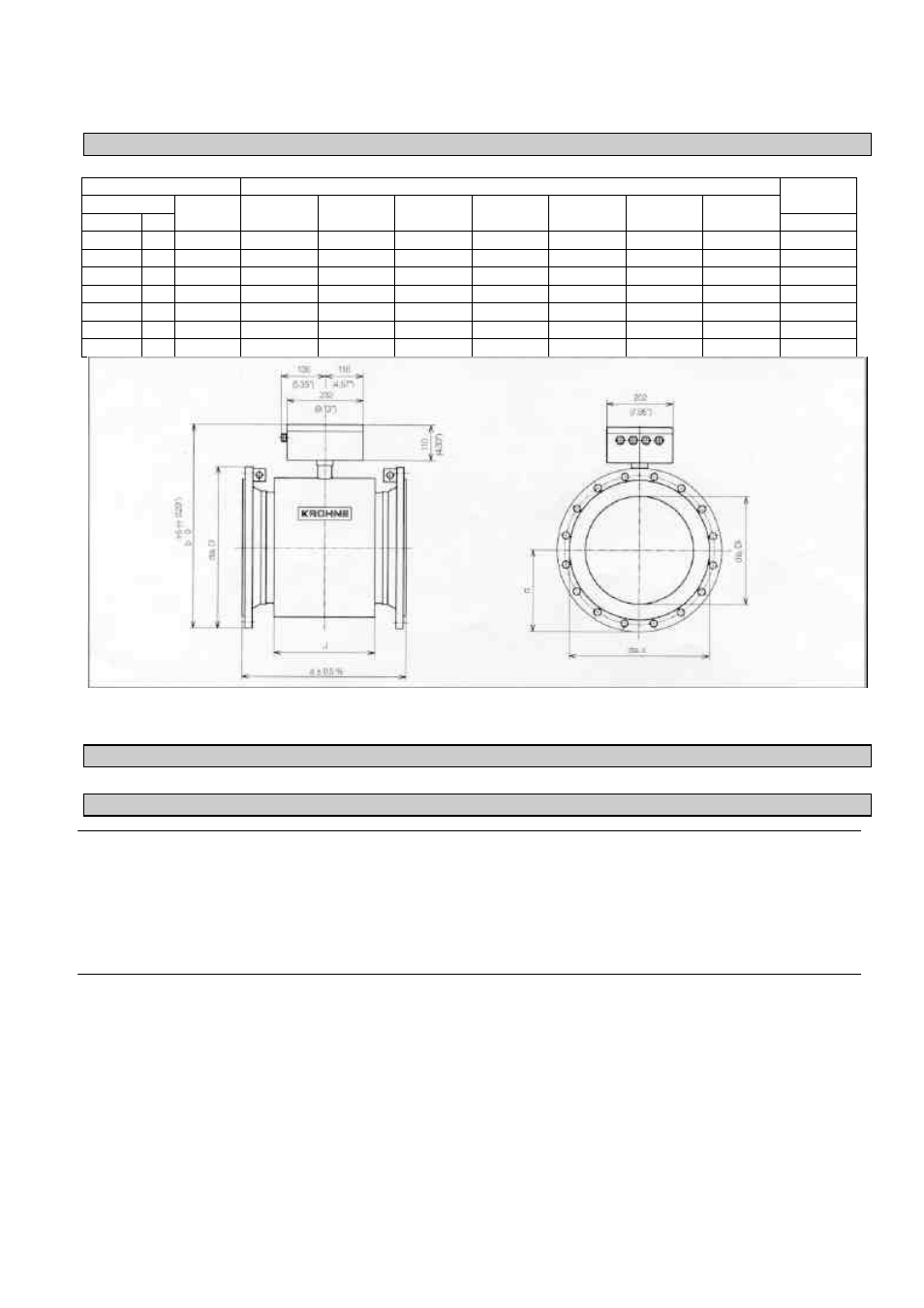
10.1.2 Dimensions and weight IFS 4000 PF
Meter size to …
Dimensions in mm (inches)
DIN 2501
Approx.
weight
Mm
PN
ANSI
B16.5
a
b
∅
c
D
j
∅
D
∅
Di
kg (lb)
DN 200
10
8”/150lb
350 (13.78)
482 (18.98)
291 (11.46)
146 (5.75)
177 (6.97)
340 (13.39)
189 (7.44)
40 (90)
DN 250
10
10”/150lb
400 (15.75)
530 (20.87)
331 (13.03)
166 (6.54)
205 (8.07)
395 (15.55)
231 (9.09)
54 (120)
DN 300
10
12”/150lb
500 (19.69)
580 (22.83)
381 (15.00)
191 (7.52)
235 (9.25)
445 (17.52)
281 (11.06)
66 (145)
DN 350
10
14”/150lb
500 (19.69)
632 (24.88)
428 (16.85)
214 (9.80)
306 (12.05)
505 (19.88)
316 (12.44)
95 (210)
DN 400
10
16”/150lb
600 (23.62)
689 (27.13)
483 (19.02)
242 (9.53)
386 (15.20)
565 (22.24)
365 (14.37)
115 (255)
DN 500
10
18”/150lb
600 (23.62)
792 (31.18)
585 (23.03)
293 (11.54)
386 (15.20)
670 (26.38)
467 (18.39)
145 (320)
DN 600
10
20”/150lb
600 (23.62)
876 (34.49)
694 (27.32)
347 (13.66)
386 (15.20)
780 (30.71)
567 (22.32)
180 (400)
Dimensions in mm (inch)
10.2
Signal converter IFC 110 PF
10.2.1 General information
Versions
IFC 110 PF / D
Display version, with local display and control elements (standard version for Tidalflux)
IFC 110 PF / D / MP
same as display version, but with magnetic sensors (MP) allowing the signal converter to
be operated without opening the housing.
Interfaces (optional)
HART (add-on modules)
Extras (optional)
CONFIG software and adapter for operator control by MS-DOS PC, connection to
internal ImoCom interface (bus)
Others in preparation
Current output
Function
All operating data adjustable
Galvanically isolated from all input and output circuits
Current: fixed ranges
0 – 20 mA and 4 – 20 mA
variable ranges
for Q = 0 %
I
0%
= 0 – 16 mA
for Q = 100 %
I
100%
= 4 – 20 mA
for Q > 100 %
I > 20 (22 mA max.)
Load
15 – 500
Ω
Error identification
0 / 22 mA and variable
Forward/reverse mode
direction identified via status output