IAI America E-Con User Manual
Page 85
71
Movement flag during stop
This parameter defines whether to enable or disable the dynamic brake while the actuator is stopped.
It has been set to “1” (Enable) at the factory.
This parameter need not be changed in normal conditions of use, but there are situations where the actuator
must be moved by hand with the servo turned OFF but the actuator does not move smoothly due to large slide
resistance (this often occurs with actuators having a short ball screw lead).
In this case, you can change the value of parameter No. 14 to “0” (Disable) to release the dynamic brake and
make the actuator move smoothly.
Caution:
Before resuming normal operation, be sure to reset this parameter to “1” (Enable).
Home sensor input polarity
On actuators of the standard specification, homing is performed based on the mechanical-end push mode.
However, you can also select the sensor mode as an option.
At the factory, this parameter has been set to an appropriate value in accordance with the user’s specification.
Therefore, it need not be changed in normal conditions of use. If you have changed the mode after shipment,
change the value of parameter No. 18.
Definition of settings:
0 (Standard specification; no sensor)
1 (Use home sensor; sensor polarity conforming to “contact a” logic)
2 (Use home sensor; sensor polarity conforming to “contact b” logic)
Overrun sensor input polarity
Actuators of the standard specification do not come with an over-travel detection sensor, but it can be installed
as an option.
At the factory, this parameter has been set to an appropriate value in accordance with the user’s specification.
Therefore, it need not be changed in normal conditions of use. If you have changed the mode after shipment,
change the value of parameter No. 19.
Definition of settings:
0 (Standard specification; no sensor)
1 (Use over-travel detection sensor; sensor polarity conforming to “contact a” logic)
2 (Use over-travel detection sensor; sensor polarity conforming to “contact b” logic)
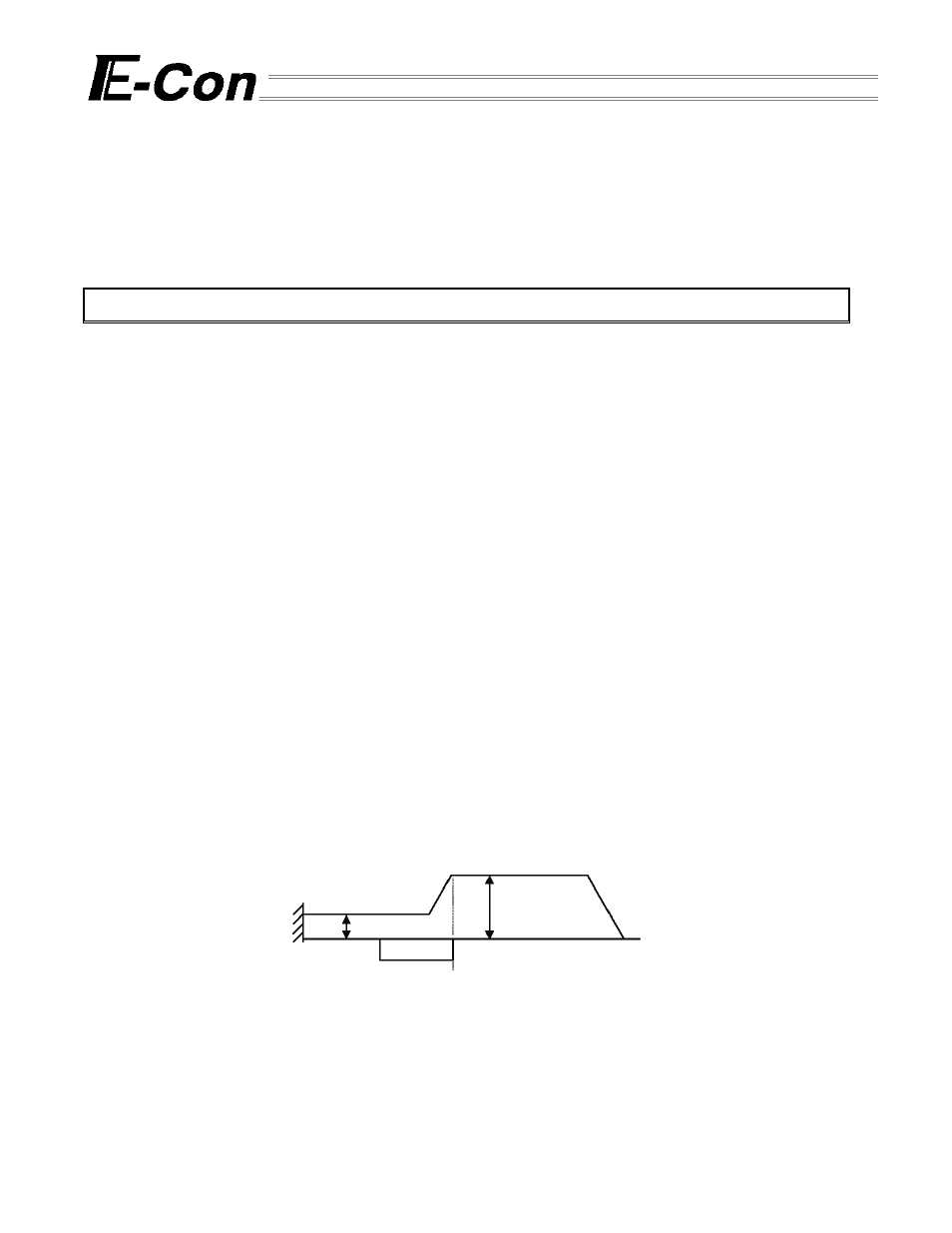
Creep sensor input polarity
Normally, the traveling speed during homing is set to the low speed of 20 mm/s.
Therefore, an actuator with a long stroke takes a longer time to complete homing if the power was cut off when
the actuator was away from home.
An optional creep sensor is provided to save time in this situation.
The actuator moves at the creep speed (100 mm/s or below) until a creep sensor is detected. Once a creep
sensor is detected, the traveling speed will change to the homing speed (20 mm/s).
The actuator starts decelerating upon detection of a creep sensor.
At the factory, this parameter has been set to an appropriate value in accordance with the user’s specification.
Therefore, it need not be changed in normal conditions of use. If you have changed the mode after shipment,
change the value of parameter No. 20.
Definition of settings:
0 (Standard specification; no sensor)
1 (Use creep sensor; sensor polarity conforming to “contact a” logic)
2 (Use creep sensor; sensor polarity conforming to “contact b” logic)
Mechanical end
Homing speed
Creep sensor
Creep speed
Power input position