GE Industrial Solutions 6KCV300WPD User Manual
Page 155
Speedobs is a algorithm with two time constants: Taul
and Tau2
These inputs determine time
that observer takes to estimate speed and acceleration.
The simplest case is when user needs to estimate only speed: Tau2 have to set to le9
Taul
is
speed estimation time constant. It represents the same concept of time constant in electronic analog circuits
and it is equivalent to the product of Resitauce and Capacitance. It is the time that estimated value takes to
reach 63% of its steady state value. After four times time constant reaches steady state value (98%).
More complex case is when user needs to
estimate
both variables: speed and acceleration. This is the case
when current feed-forward is needed.
If for example user wants to estimate speed with a time constant of 0.05
and acceleration with a time
constant of 0.5
he has to set Taul
to 0.05
and Tau2
to 0.5
to
0.05
and Taul
to 0.5
is absolutely equivalent).
In general terms the least value between Taul and Tau2 is the time constant of speed estimation while the
largest value is the time constant of acceleration estimation.
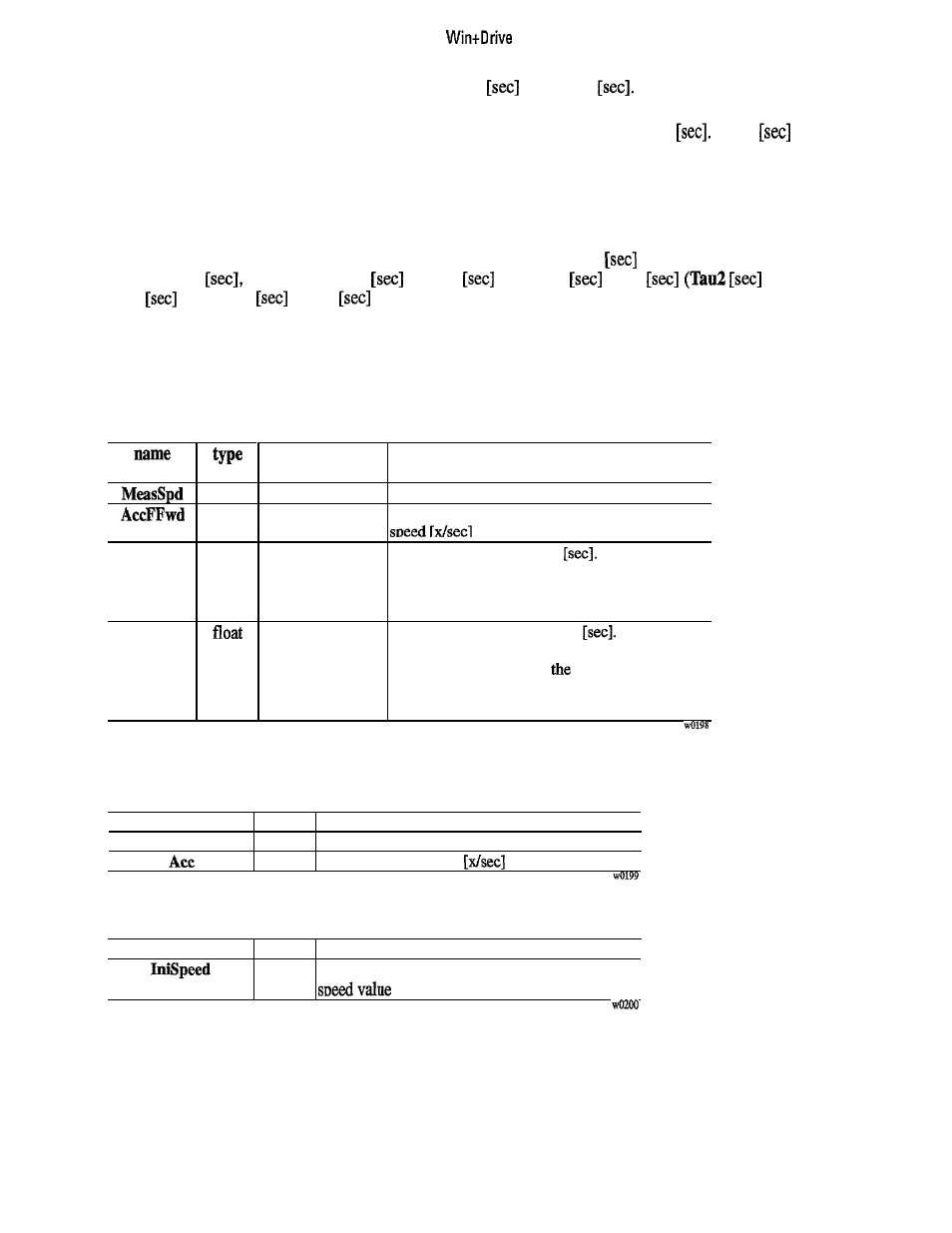
Input ports
Taul
float
Tau2
Output ports
float
float
alternative type description
always
always
Measured speed [x]
Acceleration feed-forward to improve estimation
always
always
First observer time constant
The least value
between
Taul
and
Tau2
is the time constant of
speed estimation while the largest value is the time
constant of acceleration estimation.
Second observer time constant
The least
value between
Taul
and
Tau2
is the time constant
of speed estimation while
largest value is the
time constant of acceleration estimation.
name
speed
type
function
float
Estimated speed [x]
float
Estimated acceleration
Parameters
name
type
function
float
Speed [x] using by observer as a initial estimated
1 4 5