Hyundai HI4 User Manual
Page 407
11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 42
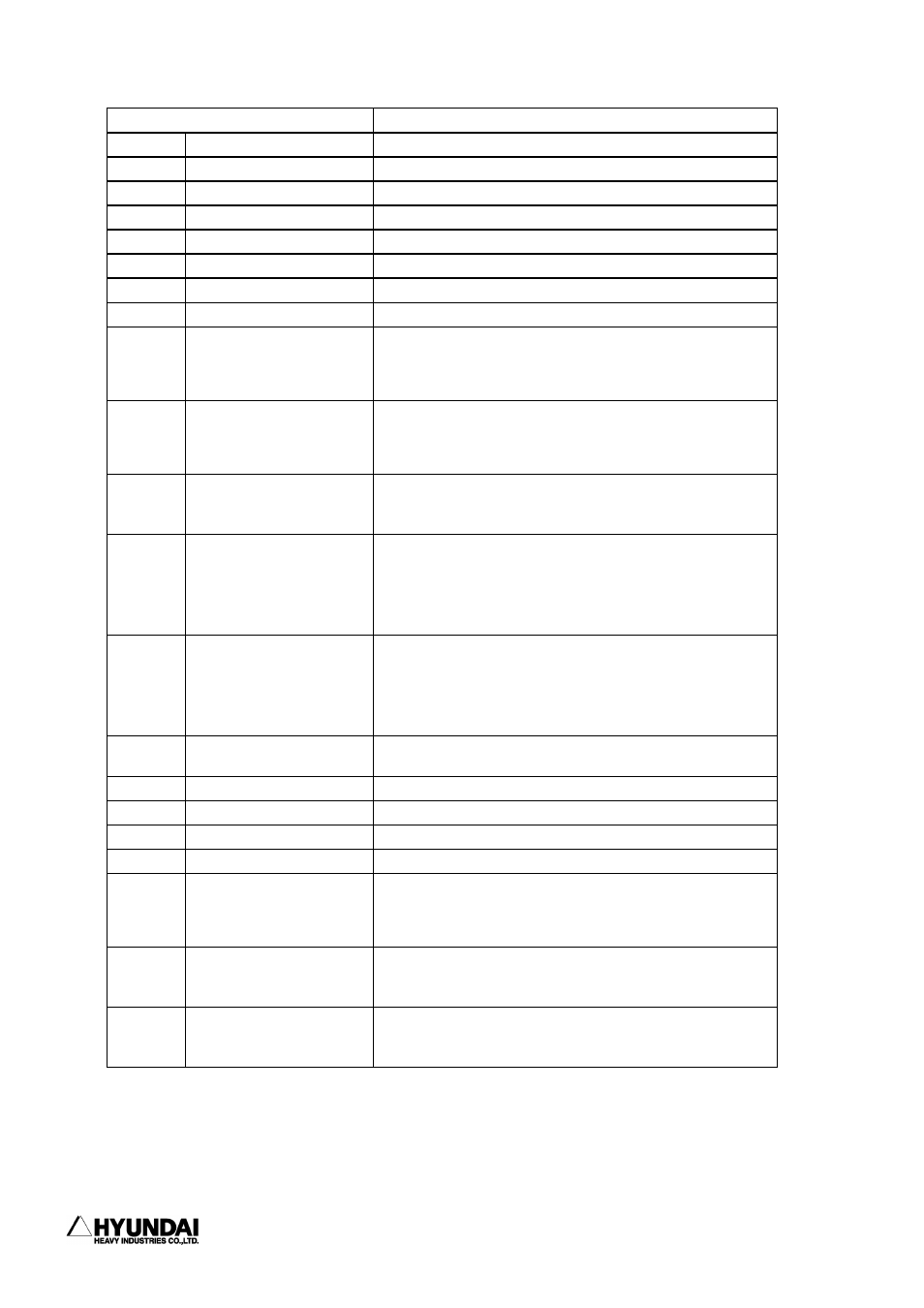
M I T Function Code
Example of corresponding HR - BASIC syntax.
M0
DO signal RESET
GO1=0
M1∼8
DO signal ON/OFF
DO1=1∼DO8=1
or
DO1=0∼DO8=0
M10
DO signal RESET
GO2=0
M11∼18
DO signal ON/OFF
DO11=1∼DO18=1 or DO11=0∼DO18=0
M20
Step Jump (Uncond.)
GOTO
M21
Step Call (Uncond.)
GOSUB
M22
Step Return (Uncond.)
RETURN
M23
Step Jump (Conditional) IF DIn=1 THEN
M24
Step Call (Conditional)
IF DIn=1 THEN
GOSUB
ENDIF
M25
Step Return
(Conditional)
IF DIn=1 THEN
RETURN
ENDIF
M26
Step Jump (Count
Conditional)
IF Vn%=
Vn%=Vn%+1 (Vn% value is initialized out of cycle).
M27
Step Call (Count
Conditional)
IF Vn%=
GOSUB
ENDIF
Vn%=Vn%+1 (Vn% value is initialized out of cycle).
M28
Step Return (Count
Conditional)
IF Vn%=
RETURN
ENDIF
Vn%=Vn%+1 (Vn% value is initialized out of cycle).
M29
Robot Interrupt (DI
signal)
MOVE L, P1, S=..., A=..., H=... UNTIL =1
M32
Output signal SET
DOn=1
M33
Spot welding condition SPOTCND
M34
Output signal RESET
DOn=0
M41
Robot Stop (Uncond.)
STOP
M42
Robot Stop (Conditional)
IF DIn=1 THEN
STOP
ENDIF
M43
Line number designated
output within MB signal
group
GO
M44
binary coded output
within MB signal group.
GO