Hyundai HI4 User Manual
Page 408
11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 43
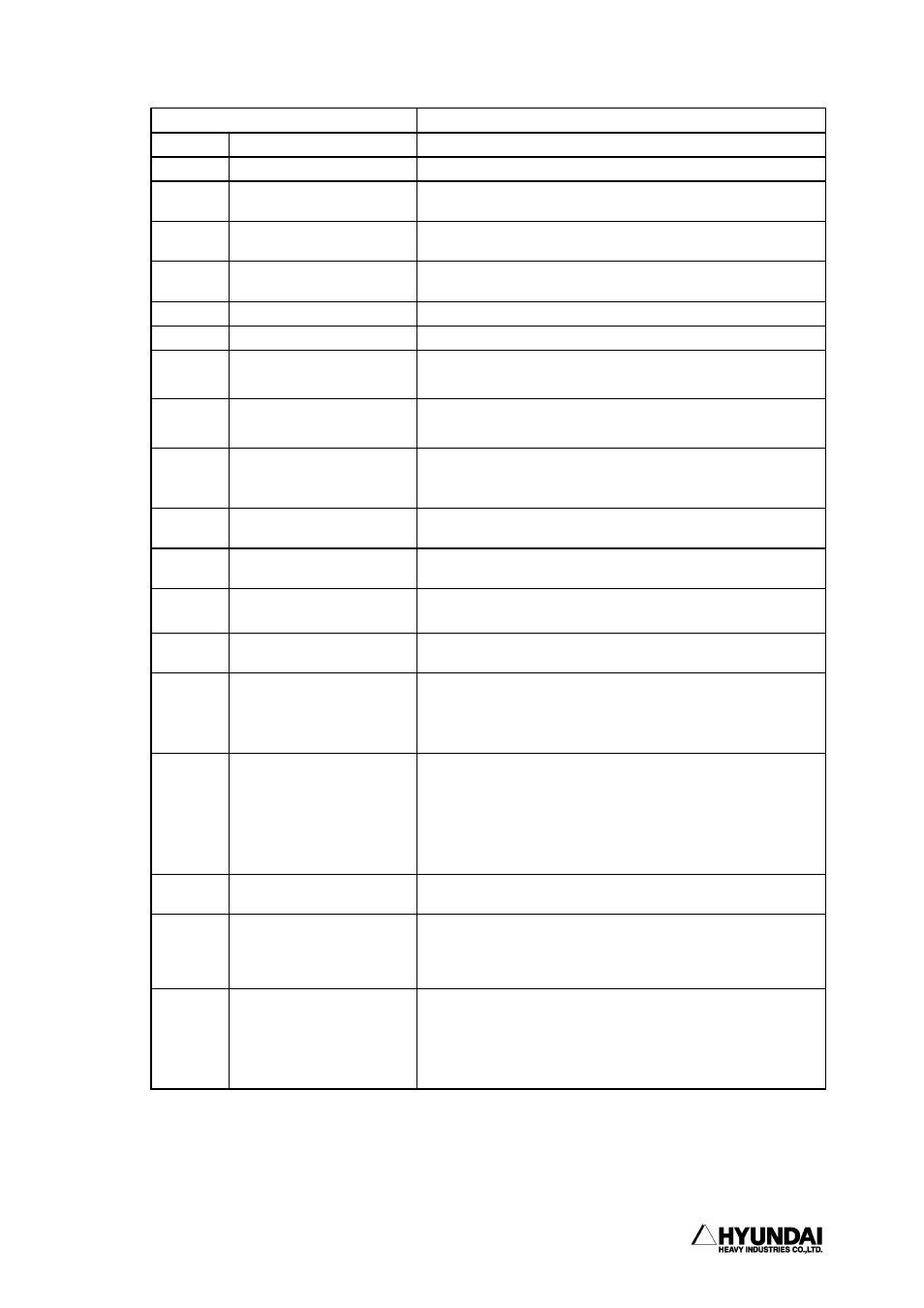
M I T Function Code
Example of corresponding HR - BASIC syntax.
M51
Shift Requirements
SREQ
M52
Online Shift
SONL
M53
Online Coordinate
Conversion
TONL1
M54
Online Coordinate
Conversion
TONL2
M56
Timer Cnditional Shift
Function.
SREQT(SREQT)
M58
XYZ Shift
SXYZ
M59
Search Function
SEA
M62
Function setting Step
Jump (Uncond.)
GOTO
M63
Function setting Step
Jump (I conditional)
IF DIn=1 THEN
M64
Function setting Step
Jump (Count Conditional)
IF Vn%=
Vn%=Vn%+1 (Vn% value is initialized out of cycle).
M68
Shift Amount
Substitution
Rn=
M69
Shift Amount Addition
Rn.X=Rn.X+
element.
M70
Count Register Initial
Value Setting
LETN
M80
Program Call (Uncond.)
CALL
END)
M81
Program Call (DI Cond.)
IF DIn=1 THEN
CALL
END)
ENDIF
M82
Prograsm Call
(Count Conditional)
IF Vn%=
CALL
program, END)
ENDIF
Vn%=Vn%+1 (Vn% value is initialized out of cycle).
M83
Program Jump (Uncond.) JMPP
M84
Program Jump (DI Cond.)
IF DIn=1 THEN
JMPP
ENDIF
M85
Program Jump
(Count Conditional)
IF Vn%=0 THEN
JMPP
ENDIF
Vn%=Vn%+1 (Vn% value is initialized out of cycle).