Chap. 11 robot lang. explanation – Hyundai HI4 User Manual
Page 367
11. Robot Language Explanation
------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
11 - 2
CHAP. 11 ROBOT LANG. EXPLANATION
There are two ways to teach an industrial robot greatly. One is an instruction code method,
and the other is a robot language method.
Our old controller model such as Hi3CE, Hi3TB, etc.. in Hi controller series has an instruction
code method to teach.
instruction code of Hi controller
A teaching person can make a work program which can control a robot action fussily by using
hundred tens of instruction codes. But, it is very difficult or almost impossible to make
a program with instruction codes that needs numerical formula or string process and many
data's saving and process. Also, it is difficult to analyze a program for beginner because
instruction codes are consists of number codes.
On the other hand, robot language method supply that various arithmetics, string variable,
functions and numerical formula type with instruction statement groups in English.
It is general that industrial robot makers has their own unique robot language. Hyundai Hi4
has its unique robot language named HR-BASIC. This language is similar with BASIC language
grammar which is used in PC.
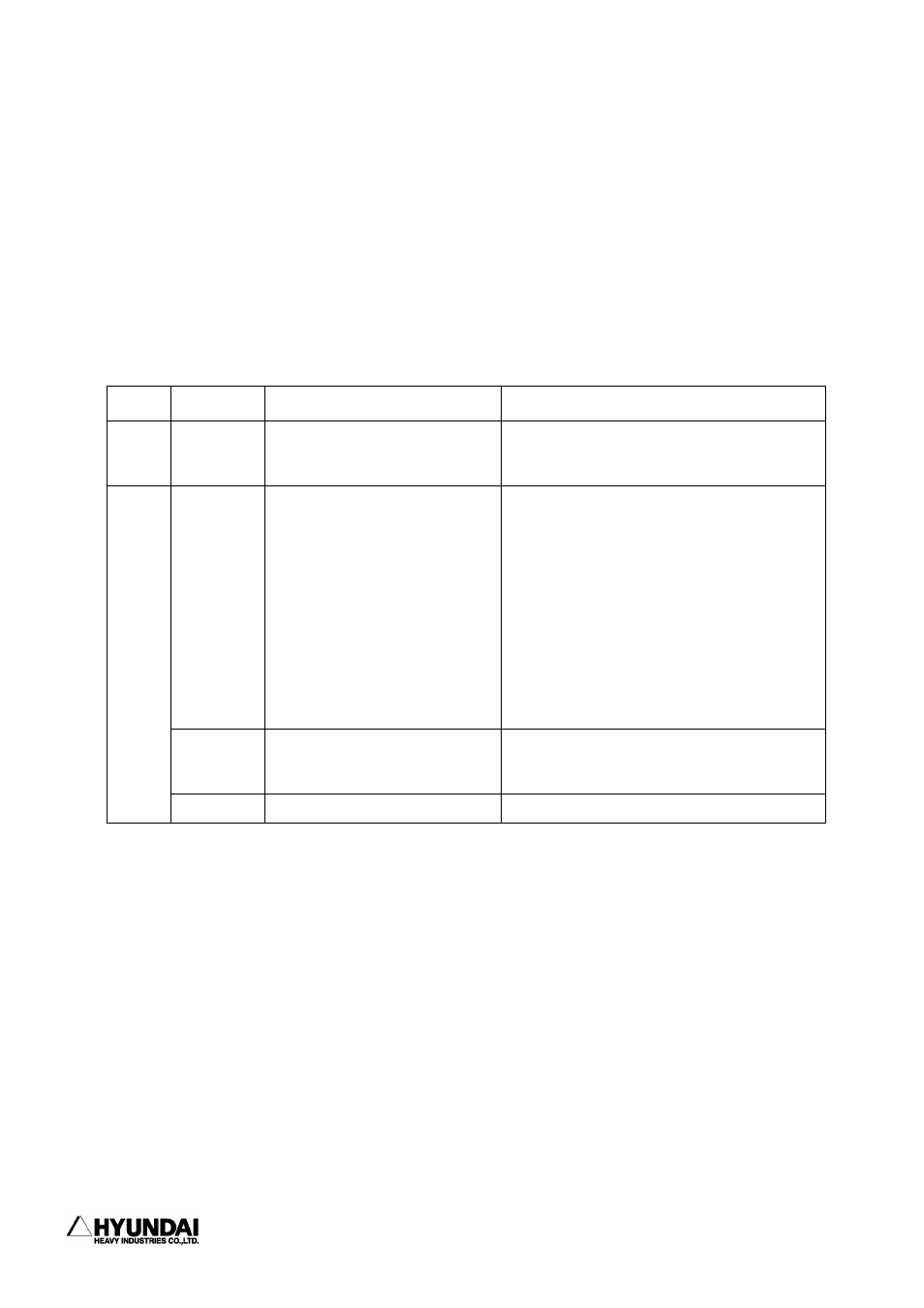
section
class
role
example
step
step code move of tool end in robot
340.5mm/s(L) A0 T0 G1 X2
speed 340mm/s
accuracy 0, tool 0, gun1, X2
M code
signal input/output
jump, call, stop
conditional jump, call, stop
repeating execution
conditional repeating
execution setting
on-line shift
welding condition,
palletize etc.
various application
function execution.
etc....
M1 1 DI1 signal output
M20 step jump
M81 5,I1 DI conditional program call
M44 3,50 GI3 group signal output
M53 1,1,5,7 online coordinate conversion
M33 2 spot welding condition output
M99 'spot comment statement
I code
DI signal wait
I25 I18 DI18 signal wait
I53 IB1,101,2,0 time conditional
GIsignal(AND)
functio
n
T code
time delay
T 5.0 5sec. wait