Without gears and with brakes – Yaskawa Sigma II Series DC Power Input SGMAJ User Manual
Page 69
3 Specifications and Dimensional Drawings
3.6.2 SGMAJ Servomotors (3000 min
-1
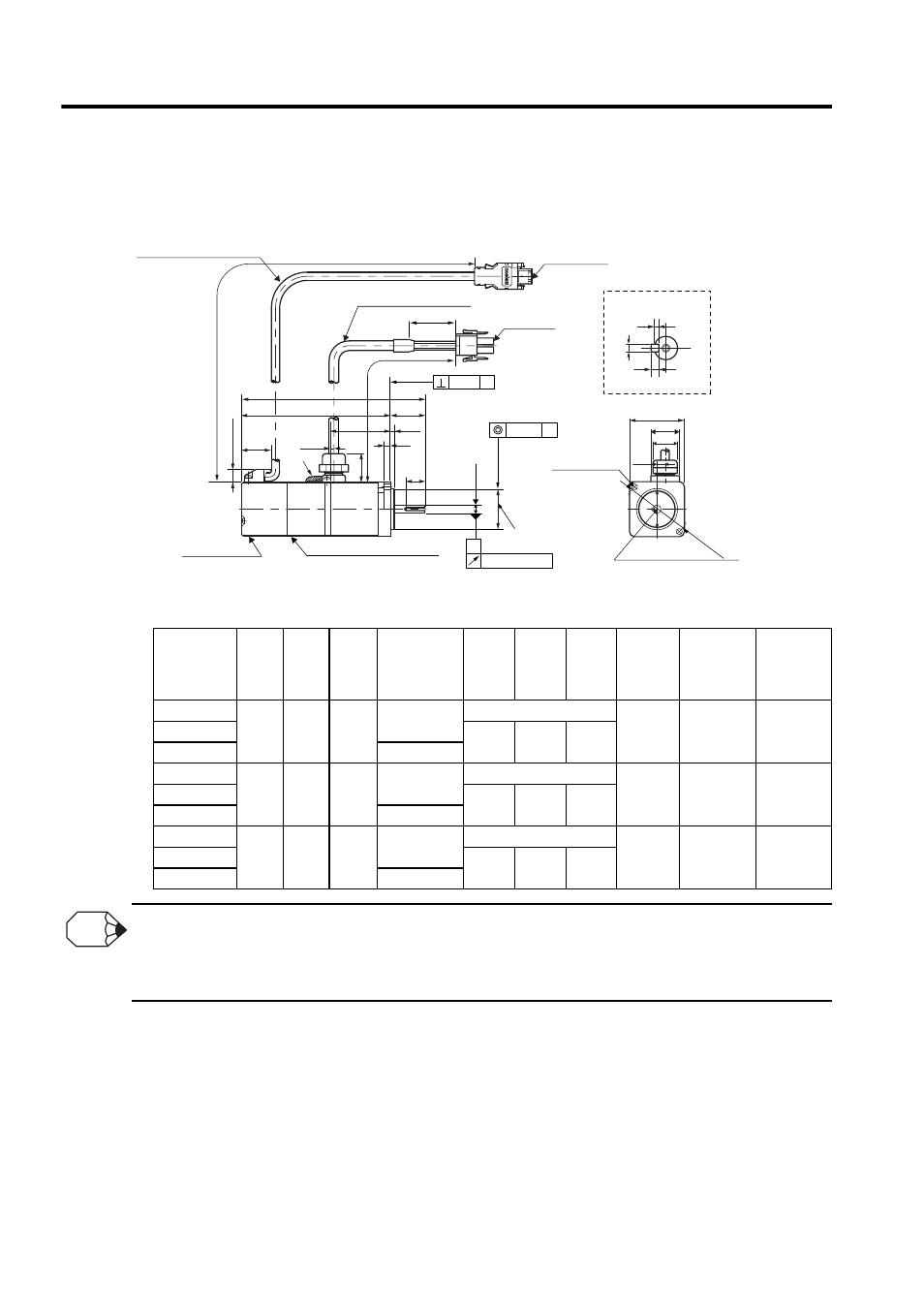
) Without Gears and With Brakes
3-28
3.6.2 SGMAJ Servomotors (3000 min
-1
) Without Gears and With Brakes
(1) 50 W, 100 W
1. The dimensions for L and LL of a servomotor incorporating an encoder with super-capacitor (model: SGMAJ-4)
are as shown below.
SGMAJ-A5, A8, and 01: L-dimension +12 mm (0.47 in), LL-dimension +12 mm (0.17 in).
2. The working point of the SGMAJ servomotor radial load is at the position of minus 5 mm from the shaft end.
Units: mm (in)
Model
SGMAJ-
L
LL
LM
Tap
×Depth
∗
U
W
T
Approx.
Mass
kg (lb)
Allowable
Radial
Load N
(lbf)
Allowable
Thrust
Load N
(lbf)
A5A2
133.5
(5.26)
108.5
(4.27)
44.0
(1.73)
No tap
No key
0.7
(1.54)
68
(15)
54
(12)
A5A4
1.2
(0.047)
2
(0.079)
2
(0.079)
A5A6
M2.5
×5L
A8CA2
160
(6.30)
135
(5.31)
61.5
(2.42)
No tap
No key
0.8
(1.76)
78
(18)
54
(12)
A8CA4
1.8
(0.071)
3
(0.12)
3
(0.12)
A8CA6
M3
× 6L
01EA2
160.0
(6.30)
135.0
(5.31)
61.5
(2.42)
No tap
No key
0.8
(1.76)
78
(18)
54
(12)
01EA4
1.8
(0.071)
3
(0.12)
3
(0.12)
01EA6
M3
×6L
Shaft End
U
L
LL
LM
3
(0.12)
(17) (0.67)
φ30h7
φSh6
φ45 (
φ1.77)
T
W
Sealants
A
φ0.04
(
φ0.0016)
A
0.04
(0.0016)
A
UL20276
Serial encoder
21 (0.83)
6
(0.24)
φ14 (φ0.55)
300 (11.81)
±30 (±1.18)
(35) (1.38)
Encoder cable
φ6 (φ0.24)
Motor cable
φ7 (φ0.28)
300 (11.81)
±30 (±1.18)
Motor plug
Encoder plug
25 (0.98)
9.6 (0.37)
22
(0.87)
2.5 (0.098)
5
(0.20)
14
(0.55)
Holding brake
(de-energization operation)
Power supply: 24 VDC
0.02 (0.0008)
φ30h7
0
(
φ1.19
0
)
-0.021
-0.0008
40 (1.57)
2-
φ4.3 (φ0.17)
Tap
× Depth*
(See the following table.)
INFO