Standard and with brakes – Yaskawa Sigma II Series DC Power Input SGMAJ User Manual
Page 61
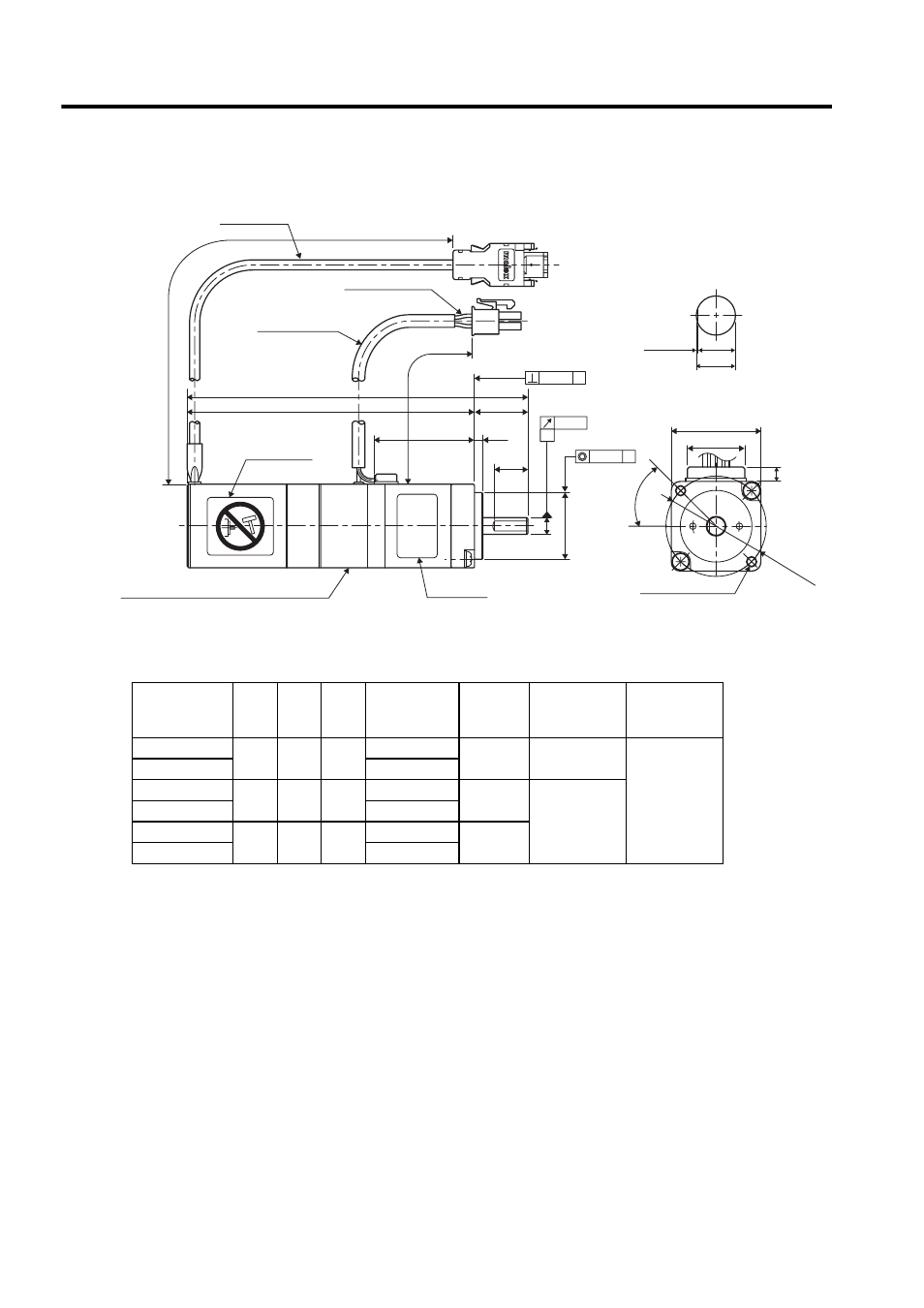
3 Specifications and Dimensional Drawings
3.5.2 SGMMJ Servomotors (3000min
-1
) Standard and With Brakes
3-20
3.5.2 SGMMJ Servomotors (3000min
-1
) Standard and With Brakes
Note: The electromagnetic brake is only used to hold the position and cannot be used to stop the servo-
motor.
φ
5h6
φ
20h7
A
φ0.04
(
φ0.0016)
A
0.02
(0.0008)
A
Nameplate
300 (11.81)
±30 (±1.18)
300(11.81)
±30(±1.18)
Protective tube
φ6 (φ0.24), Black
Encoder cable
UL20276
Motor cable
AWG24, UL10095
or UL3266
L2
L1
16 (0.63)
L
φ28 (
φ1.10)
45
°
Shaft End
φ5h6
Holding brake (de-energization operation)
Voltage: 24VDC
Brake holding torque = Rated motor torque
Warning label
10
(0.39)
2.5
(0.10)
0.04
(0.0016)
4.5 (0.18)
0.5 (0.02)
4
(0.16)
16 (0.63)
25 (0.98)
2-M3 Tap
× Depth 5
φ5h6: φ5
0
(
φ0.20
0
)
-0.008 -0.0003
φ20h7: φ20
0
(
φ0.79
0
)
-0.021 -0.0008
Units: mm (in)
Model
SGMMJ-
L
L1
L2
Flat
Approx.
Mass
kg (lb)
Allowable
Radial Load
N (lbf)
Allowable
Thrust Load
N (lbf)
A1A2C
101.5
(3.40)
85.5
(3.37)
26.5
(1.04)
Not applied
215
(474)
34.3
(7.71)
14.7
(3.30)
A1AAC
Applied
A2A2C
115.5
(4.55)
99.5
(3.92)
36.5
(1.44)
Not applied
270
(595)
44.1
(9.91)
A2AAC
Applied
A3A2C
125.5
(4.94)
109.5
(4.31)
46.5
(1.83)
Not applied
310
(683)
A3AAC
Applied