Parameter setting – Lenze 931K User Manual
Page 86
Parameter setting
Position controller (position control function)
Description of the objects
l
86
KHB 13.0002−EN 4.1
Characteristics
Possible settings
Name
Index
Description
Selection
Lenze
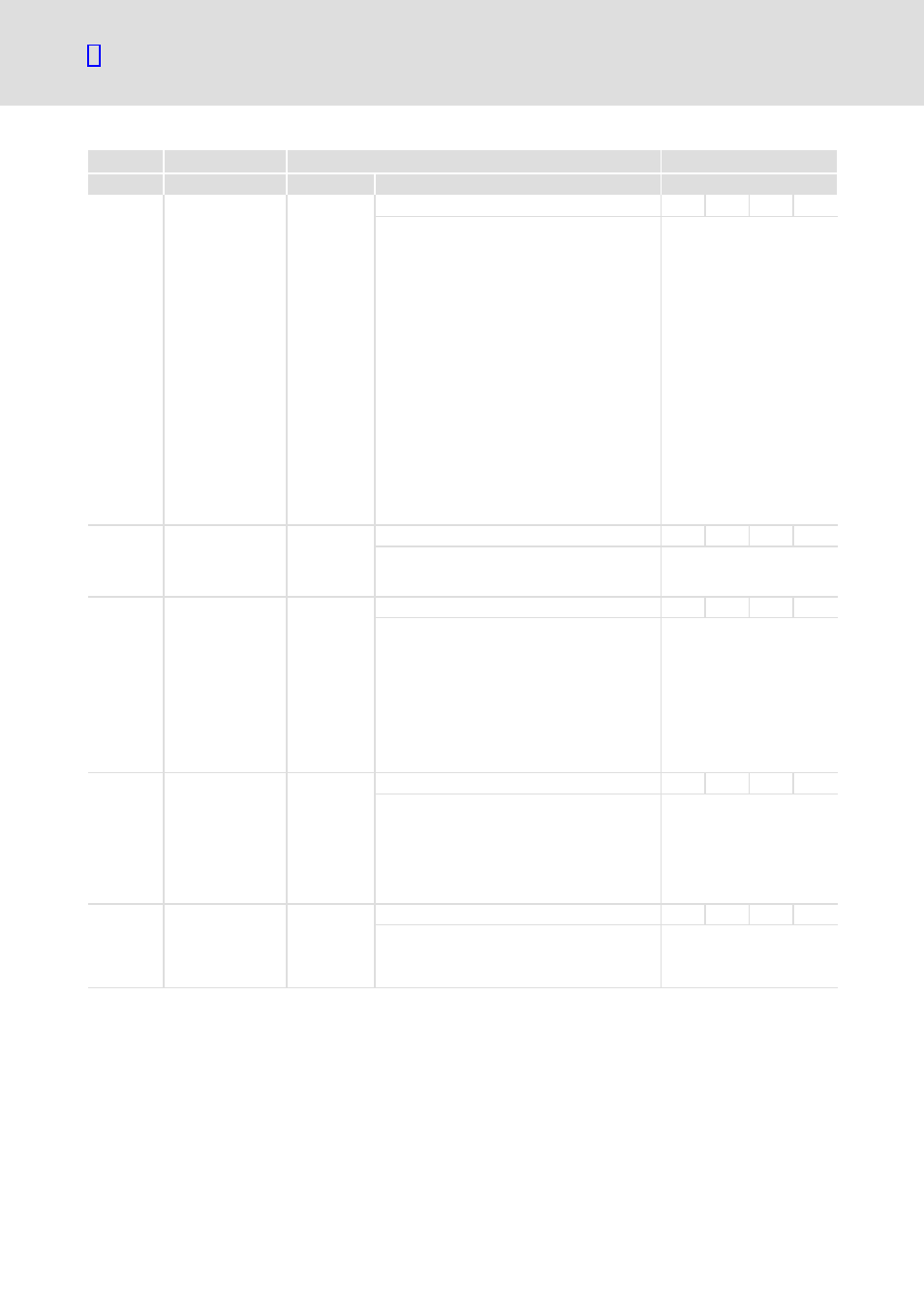
6065
h
0 following_error_
window
9102
00000000
h
{1 inc}
7FFFFFFF
VAR
UINT32
RW
MAP
Symmetrical range around
the position setpoint.
If the actual position value is
outside the range, a
following error occurs and bit
13 of the status word is set.
Causes for following errors:
l
The drive is blocked
l
The positioning speed is
too high
l
The acceleration values
are too high
l
The value entered for the
following_error_window
index is too low
l
The position controller is
not parameterised
correctly
The unit can be set via the
factor group.
6066
h
0 following_error_
time_out
100
0
{1 ms}
27314
VAR
UINT16
RW
MAP
If the following error lasts
longer than 100 ms, bit 13 of
the status word is set.
60FA
h
0 control_effort
{speed units}
VAR
INT32
RO
MAP
Reading−out of the position
controller correction speed.
The correction speed is the
difference between the set
position and the actual
position with consideration
of the gain.
This value is internally
supplied to the speed
controller as a setpoint.
6067
h
0 position_window
1820
−2
31
{1 inc}
2
31
−1
VAR
UINT32
RW
MAP
Symmetrical range around
the target position. The
target position is reached if
the actual position is within
this range for a certain time.
The unit can be set via the
factor group.
6068
h
0 position_window_
time
0
0
{1 ms}
65535
VAR
UINT16
RW
MAP
If the actual position is within
the position window for as
long as defined here, bit 10 of
the status word is set.