4 positioning, 1 overview, Positioning – Lenze 931K User Manual
Page 109: Overview, Operating modes, Positioning overview
Operating modes
Positioning
Overview
l
109
KHB 13.0002−EN 4.1
9.4
Positioning
9.4.1
Overview
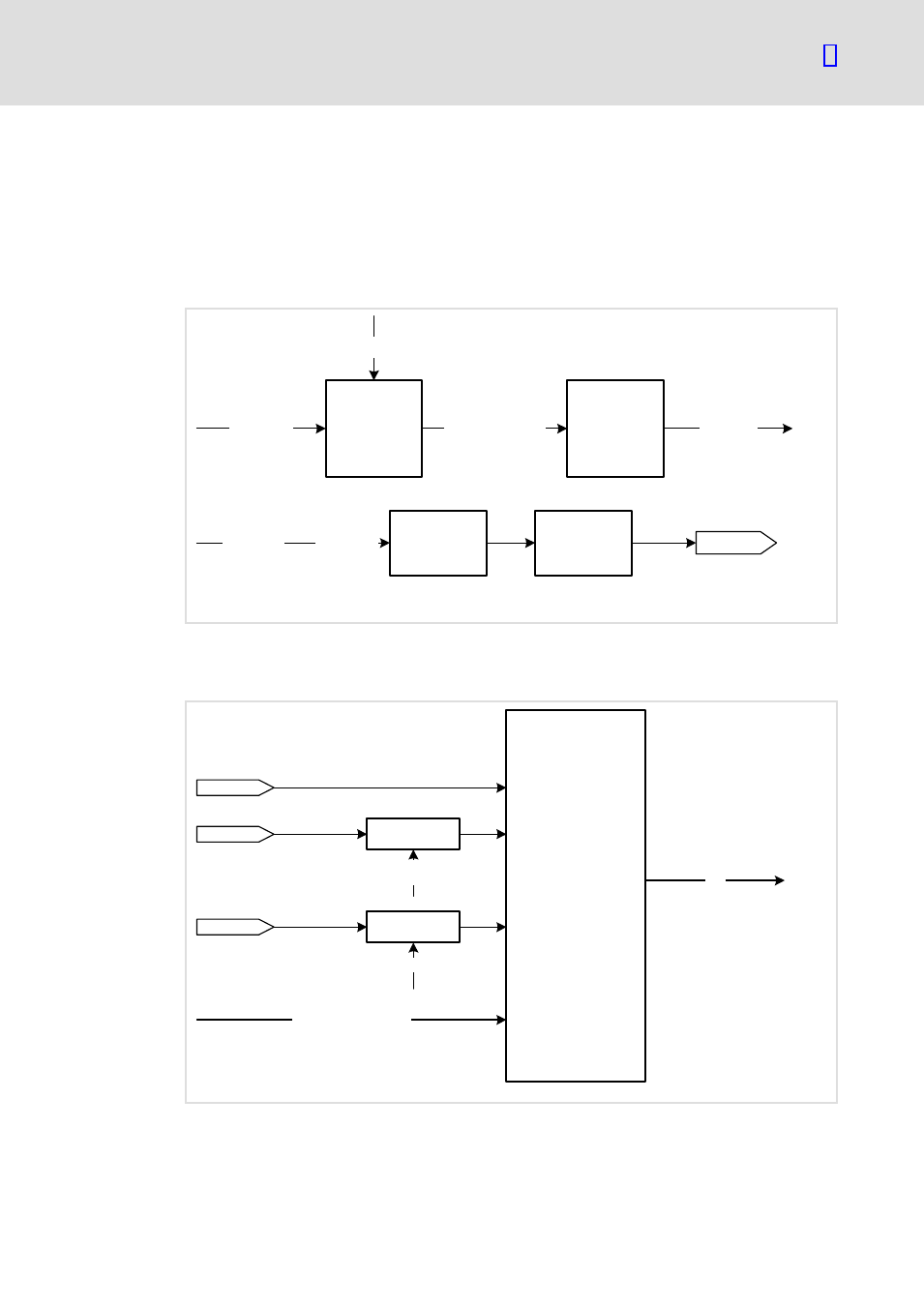
The target position (target_position) is transferred to the trajectory generator which then
generates a position setpoint (position_demand_value) for the position controller. These
two function blocks can be set independently of each other.
Position
Control
Function
Trajectory
Generator
position_demand_value
(6062h)
target_position
(607Ah)
Limit
Function
[position units]
target_postion
(607Ah)
control_effort
(60FAh)
Trajectory Generator
Parameters
home_offset (607Ah)
Multiplier
position_factor (6093h)
polarity (607Eh)
position
931e_404
Fig. 19
Trajectory generator and position controller
All trajectory generator input variables are converted to the internal units of the drive
controller by means of the factor group.
Trajectory Generator
Target Position
1
Profile Velocity
1
End Velocity
1
Profile Acceleration
1
Profile Deceleration
1
Quick Stop
Deceleration
1
Motion Profile Type
Multiplier
velocity_encoder_factor (6094h)
polarity (607Eh)
[inc]
motion_profile_type (6086h)
position
velocity
Multiplier
acceleration_factor (6094h)
velocity
position_demand_value
1
931e_405
Fig. 20
Trajectory generator
1)
Internal variables, normally not required by the user.