3 parameterising of the speed control, Parameterising of the speed control, Commissioning – Lenze 931K User Manual
Page 61: Speed control parameterising of the speed control
Commissioning
Speed control
Parameterising of the speed control
l
61
KHB 13.0002−EN 4.1
6.2.3
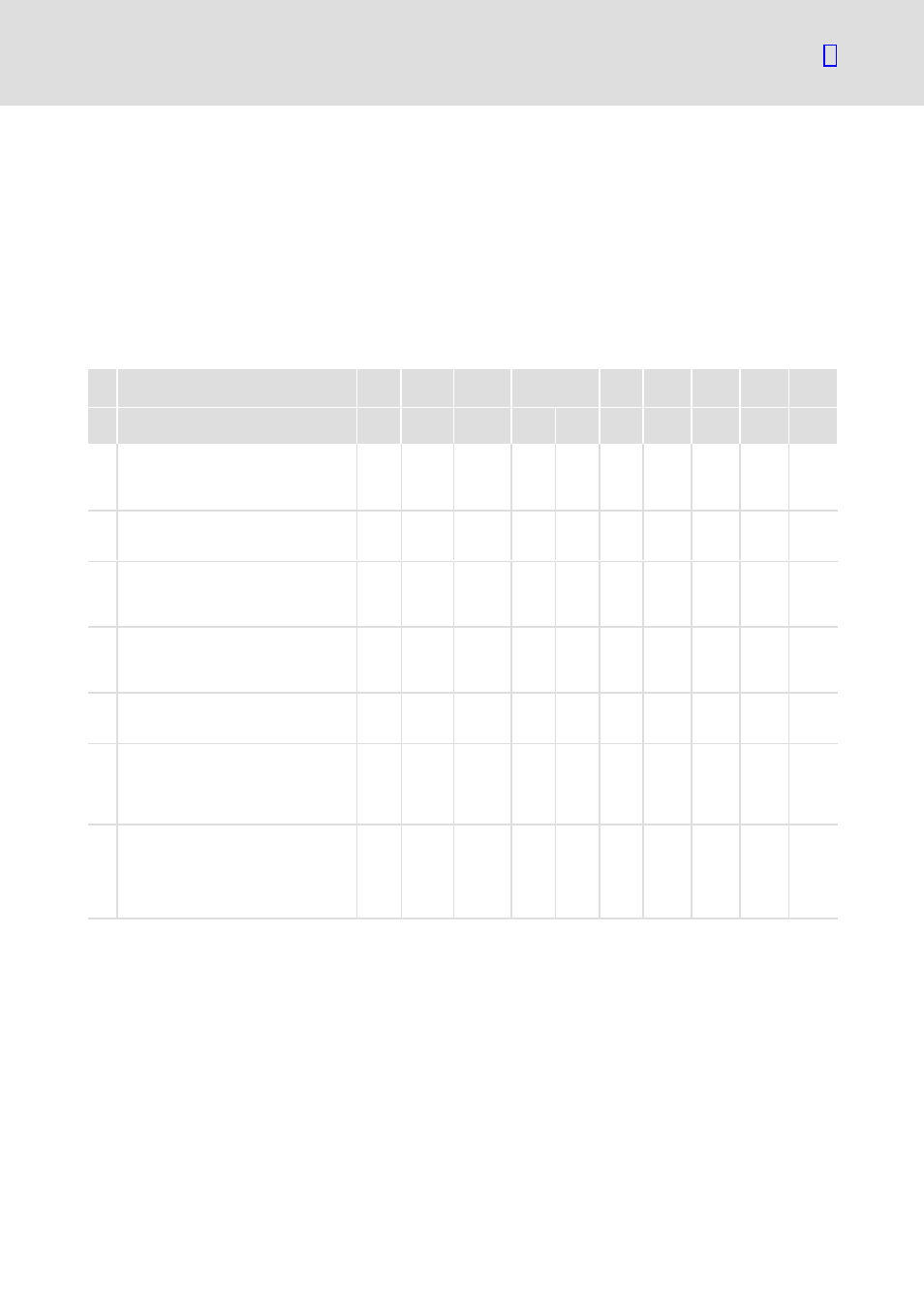
Parameterising of the speed control
Before a control can be put into operation, it is often necessary to adapt the controller
parameters in order to ensure a dynamic and sufficiently damped operational
performance. The dimensioning of the controller parameters depends on the existing
system / the respective process and must be executed in advance.
The following short example shows the selection and subsequent parameterisation of the
speed control. In addition to the control parameters (K
p
, T
n
), the limit values required for
safe operation (maximum speed, maximum acceleration and maximum braking
deceleration) are specified.
No. Description
Identi
fier
Control
field
Comma
nd code
Index
Subin
dex
Data 1 Data 2 Data 3 Data 4
Data
length
Low
byte
High
byte
1
Definition of the operating mode
For the operating mode
(modes_of_operation), the speed
control (03) is selected.
601
5
2F
60
60
00
03
00
00
00
2
Setting of the speed controller (K
p
)
A gain (velocity_control_gain) of K
p
= 2
(corresponds to 200
h
) is selected.
601
6
2B
F9
60
01
00
02
00
00
3
Setting of the speed controller (T
n
)
A reset time (velocity_control_time) of
T
n
= 10 ms (corresponds to 2710
h
) is
selected.
601
6
2B
F9
60
02
10
27
00
00
4
Setting of the actual speed value filter
The time constant of the speed filter
(velocity_control_filter_time) is set to
0.5 ms (corresponds to 1F4
h
).
601
6
2B
F9
60
04
F4
01
00
00
5
Definition of the maximum speed
The maximum speed (end_velocity) is
set to 3000 rpm (corresponds to 0BB8
h
).
601
8
23
82
60
00
B8
0B
00
00
6
Definition of the maximum acceleration
The maximum acceleration
(profile_acceleration) is
20000 rev × 4096 inc/rev × 1/min/s
(corresponds to 4E20000
h
).
601
8
23
83
60
00
00
00
E2
04
7
Definition of the maximum braking
deceleration
The maximum deceleration
(profile_deceleration) is
20000 rev × 4096 inc/rev × 1/min/s
(corresponds to 4E20000
h
).
601
8
23
84
60
00
00
00
E2
04
Tab. 5
Parameterisation of a speed controller