Parameter setting – Lenze 931K User Manual
Page 80
Parameter setting
Current controller and motor adaptation
Description of the objects
l
80
KHB 13.0002−EN 4.1
Characteristics
Possible settings
Name
Index
Description
Selection
Lenze
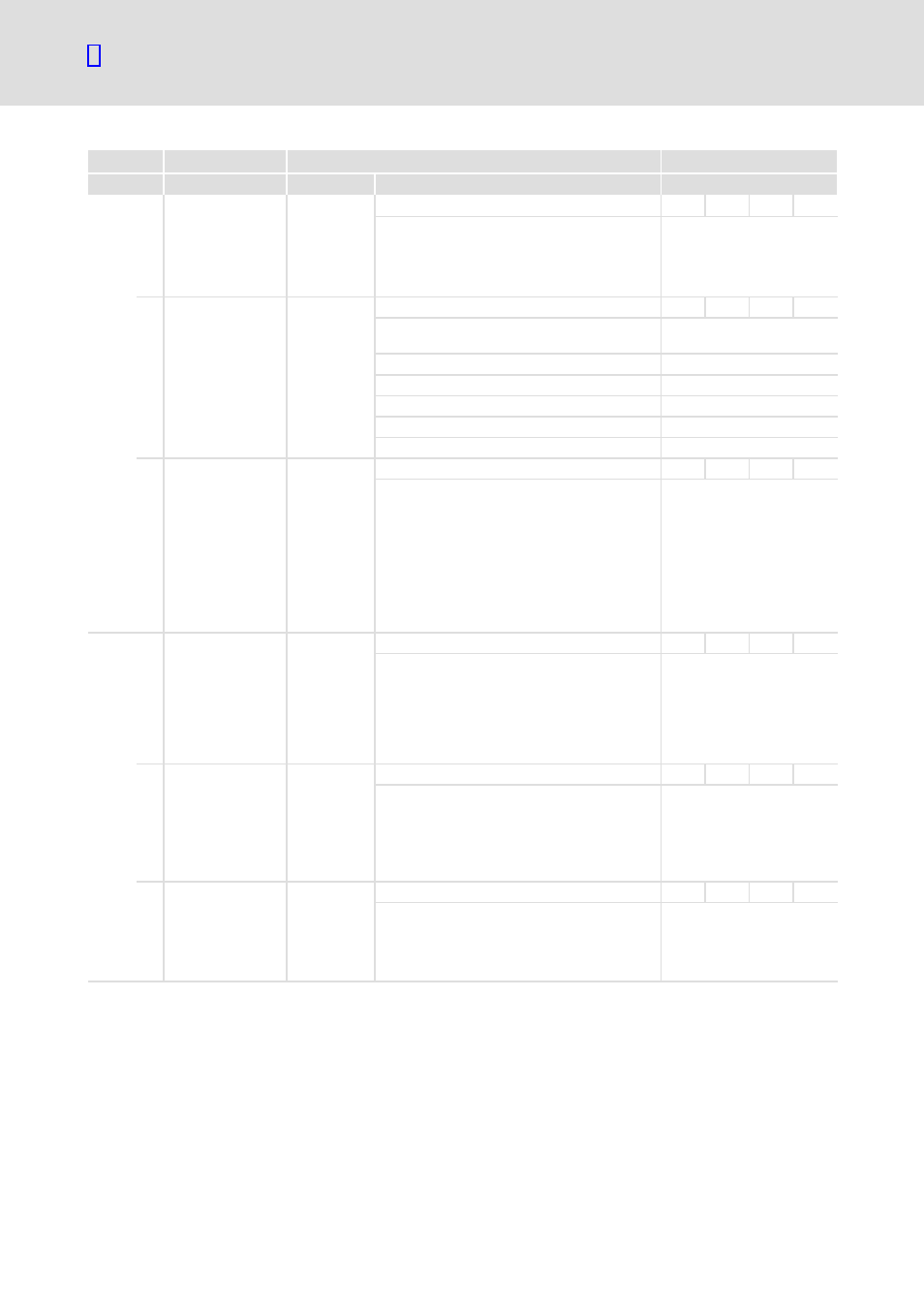
2415
h
0 current_limitation
REC
INT8
RO
Ċ
Limitation von I
max
(independently of the
operating mode).
Torque−limited speed
operation is possible.
1 limit_current_
input_channel
00
h
00
h
{1
h
}
04
h Ċ
INT8
RW
Ċ
Setpoint source for the
limiting torque.
0
No limitation
1
AIN0
2
AIN2
3
RS232
4
CAN
2 limit_current
0
0
{1 mA}
100000
Ċ
INT32
RW
Ċ
l
Setpoint source RS232,
CAN: limitation of the
torque−proportional
current
l
Setpoint sources AIN0,
AIN1: Selection of the
scaling factor for the
analog inputs. The current
in mA corresponds to an
applied voltage of 10 V.
60F6
h
0 torque_control_
parameters
REC
UINT8
RO
Ċ
Reading−out of PI−controlled
current controller data.
The gain and the time
constant apply to both the
field−generating and the
torque−generating current
controller.
1 torque_control_
gain
256
0
{1}
32 × 256
Ċ
UINT16
RW
Ċ
Setting of the proportional
gain of the current controller.
From the SDC program:
K
p
= 1.0
Setting here:
1.0 × 256 = 256 (100
h
)
2 torque_control_
time
2000
100
{1
ms}
65500
Ċ
UINT16
RW
Ċ
Setting of the current
controller time constant.
From the SDC program:
T
n
= 2 ms
Setting here: 2 ms = 2000
ms