Appendix, Index table – Lenze 931K User Manual
Page 135
Appendix
Index table
l
135
KHB 13.0002−EN 4.1
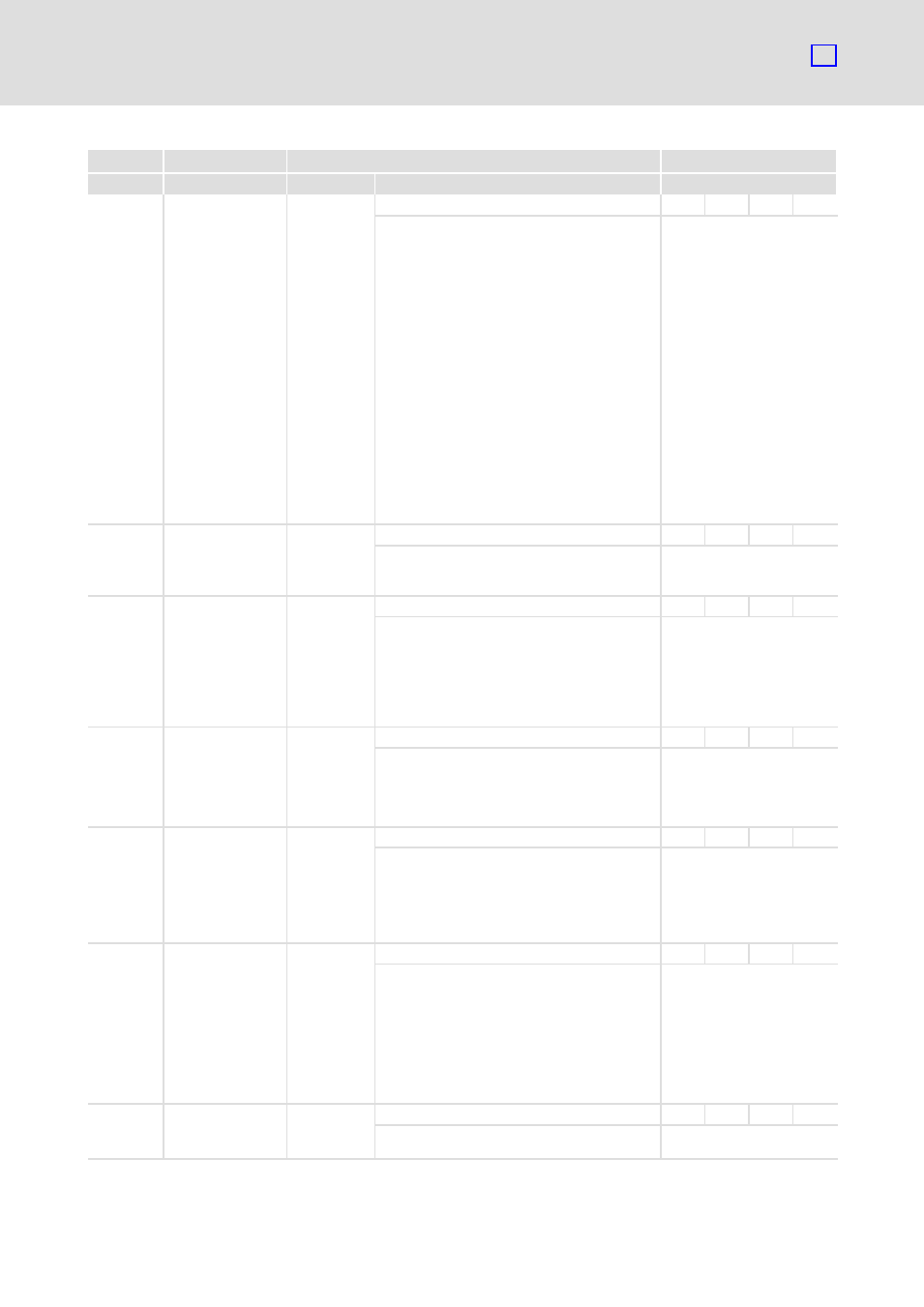
Characteristics
Possible settings
Name
Index
Description
Selection
Lenze
6065
h
0 following_error_
window
9102
00000000
h
{1 inc}
7FFFFFFF
VAR
UINT32
RW
MAP
Symmetrical range around
the position setpoint.
If the actual position value is
outside the range, a
following error occurs and bit
13 of the status word is set.
Causes for following errors:
l
The drive is blocked
l
The positioning speed is
too high
l
The acceleration values
are too high
l
The value entered for the
following_error_window
index is too low
l
The position controller is
not parameterised
correctly
The unit can be set via the
factor group.
6066
h
0 following_error_
time_out
100
0
{1 ms}
27314
VAR
UINT16
RW
MAP
If the following error lasts
longer than 100 ms, bit 13 of
the status word is set.
6067
h
0 position_window
1820
−2
31
{1 inc}
2
31
−1
VAR
UINT32
RW
MAP
Symmetrical range around
the target position. The
target position is reached if
the actual position is within
this range for a certain time.
The unit can be set via the
factor group.
6068
h
0 position_window_
time
0
0
{1 ms}
65535
VAR
UINT16
RW
MAP
If the actual position is
within the position window
for as long as defined here,
bit 10 of the status word is
set.
6069
h
0 velocity_sensor_
actual_value
{1 inc/s}
VAR
INT32
RO
MAP
Reading−out of the speed
value directly on the encoder
system.
However, for determining
the actual speed the object
606C
h
should be used.
606B
h
0 velocity_demand_
value
{1 rpm}
VAR
INT32
RO
MAP
Current speed setpoint.
This value is affected by the
setpoint of the ramp
generator / the trajectory
generator.
If the position controller is
activated, the correction
speed of this controller is
added.
606C
h
0 velocity_actual_
value
{1 rpm}
VAR
INT32
RO
MAP
Reading−out of the actual
speed.