Appendix, Index table – Lenze 931K User Manual
Page 139
Appendix
Index table
l
139
KHB 13.0002−EN 4.1
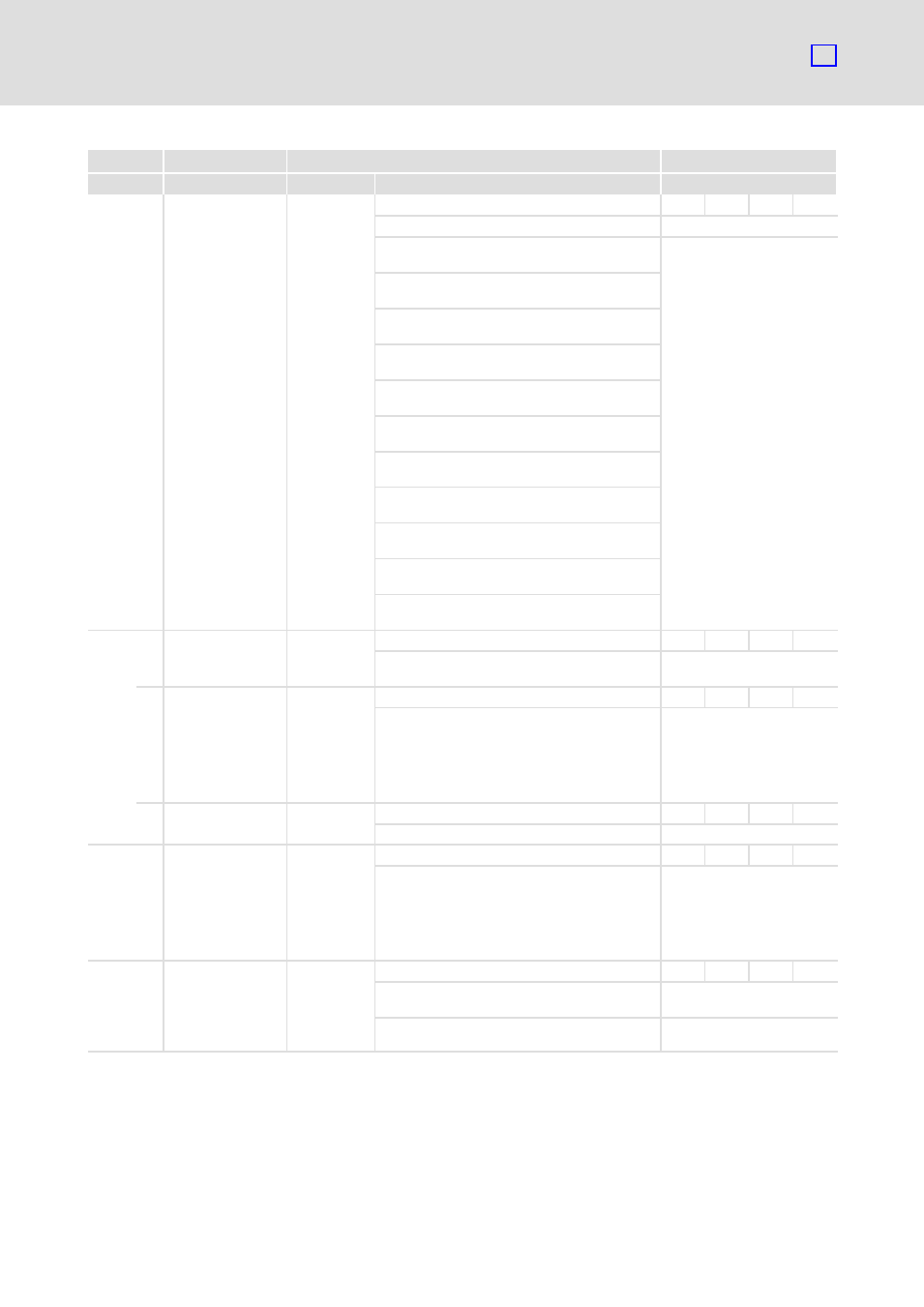
Characteristics
Possible settings
Name
Index
Description
Selection
Lenze
6098
h
0 homing_method
17
−18
{1}
34
VAR
INT8
RW
Ċ
Value
Direction
Target
Ref. point for zero
−18
Positive Limit
stop
Limit stop
Selection of the homing
variant.
There are 3 homing signals:
l
Negative and positive
limit switches
l
Zero pulse (periodic) of
the angle encoder
l
Negative and positive
limit stops
If a method is selected for
homing, the following
settings are made:
l
The reference source
(neg./pos. limit switch,
neg. / pos. limit stop)
l
The direction and the
sequence of the homing
run
l
The way in which the zero
pulse of the used angle
encoder is evaluated
−17
Negativ
e
Limit
stop
Limit stop
−2
Positive Limit
stop
Zero pulse
−1
Negativ
e
Limit
stop
Zero pulse
1
Negativ
e
Limit
switch
Zero pulse
2
Positive Limit
switch
Zero pulse
17
Negativ
e
Limit
switch
Limit switch
18
Positive Limit
switch
Limit switch
33
Negativ
e
Zero
pulse
Zero pulse
34
Positive Zero
pulse
Zero pulse
35
No
motion
Current actual
position
6099
h
0 homing_speeds
ARR
UINT32
RO
Ċ
Reading−out of the homing
speed
1 speed_during_
search_for_switch
100
0
{1 rpm}
2
32
−1
Ċ
UINT32
RW
MAP
Speed for approaching the
limit switch or the limit stop.
Usually the speed is then
changed and the final
position is approached with
a slower speed.
2 speed_during_
search_for_zero
10
0
{1 rpm}
2
32
−1
Ċ
UINT32
RW
MAP
Selection of the slower speed
609A
h
0 homing_
acceleration
250
0
{1 rpm/s}
2
32
−1
VAR
UINT32
RW
MAP
Selection of the acceleration
and deceleration for the
homing run.
The value applies to all
homing methods and to both
homing speeds.
60C0
h
0 interpolated_
submode_select
−2
−2
{}
−2
VAR
INT16
RW
MAP
Selection of the interpolation
type.
−2
Linear interpolation without
buffer