Appendix, Index table – Lenze 931K User Manual
Page 142
Appendix
Index table
l
142
KHB 13.0002−EN 4.1
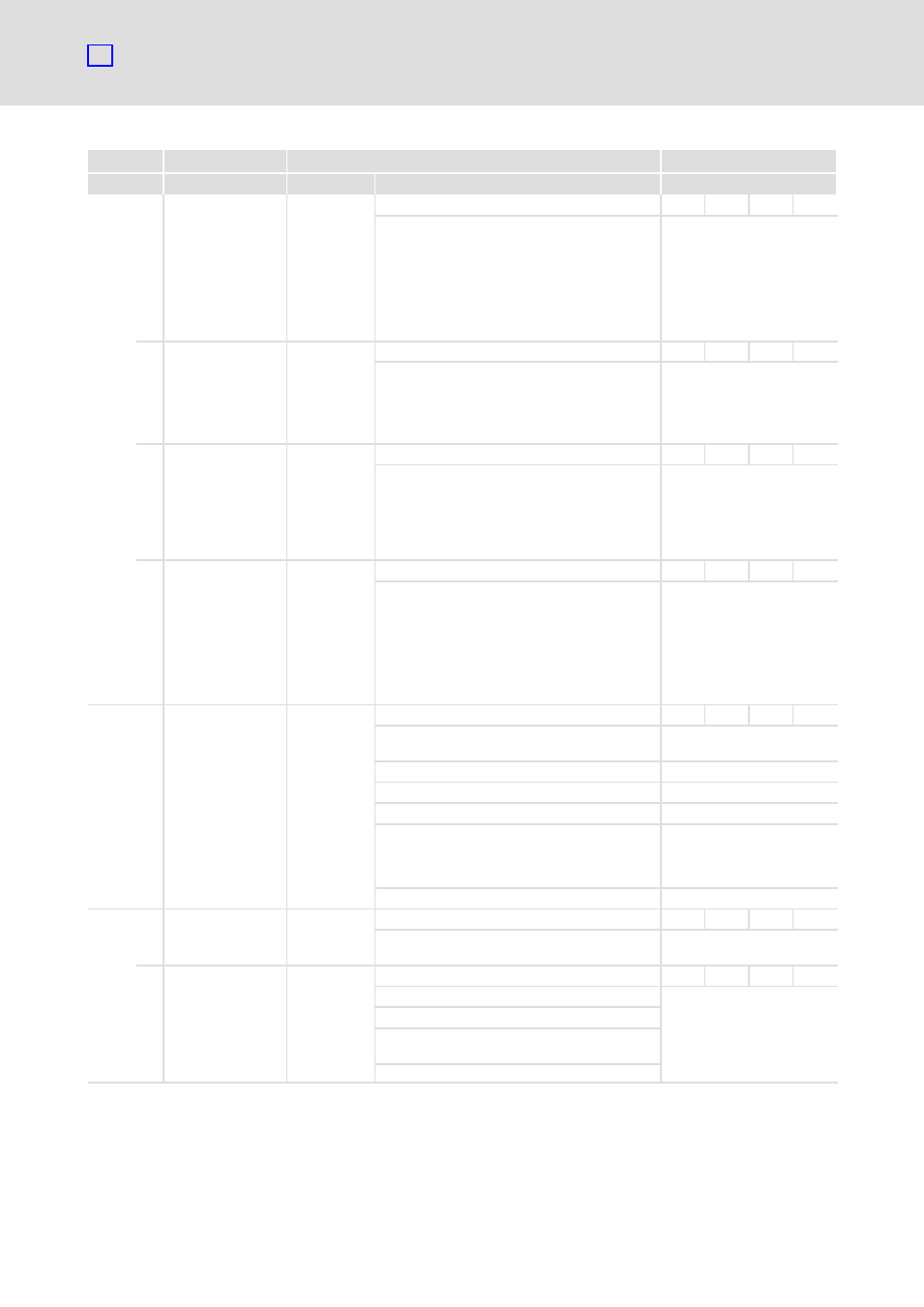
Characteristics
Possible settings
Name
Index
Description
Selection
Lenze
60FB
h
0 position_control_
parameter_set
REC
UINT8
RO
Ċ
Reading−out of the position
controller data.
The position controller
operates with internal
feedforwarding so that
deviation control is
minimised and the controller
settling time is reduced.
1 position_control_
gain
52
0
{1}
64 × 256
Ċ
UINT16
RW
Ċ
Setting of the position
controller gain.
From the SDC program:
K
p
= 0.2
Setting here: 0.2 × 256 = 52
4 position_control_
v_max
500
0
{1 rpm}
32767
Ċ
UINT32
RW
MAP
Limitation of the position
controller correction speed.
This is required since even
small position deviations can
cause considerable
correction speeds.
5 position_error_
tolerance_window
13
0
{1 inc}
65535
Ċ
UINT32
RW
MAP
Definition of the size of a
position deviation up to
which the position controller
does not intervene (dead
zone). This can be used for
stabilisation purposes, for
instance, if there is backlash
present in the system.
60FD
h
0 digital_inputs
0
00000000
h
{1}
FFFFFFFF
h
VAR
UINT32
RO
MAP
Reading−out of the digital
inputs.
Bit no.
Value
Digital input
0
00000001
h
Neg. limit switch
1
00000002
h
Pos. limit switch
3
00000008
h
Interlock
(controller or
power stage
enable is missing)
16 − 25
03FF0000
h
DIN0 ... DIN9
60FE
h
0 digital_outputs
ARR
UINT8
RO
Ċ
Reading−out of the digital
outputs.
1 digital_outputs_
data
0
00000000
h
{1
h
}
FFFFFFFF
h
Ċ
UINT32
RW
MAP
Bit no.
Value
Digital output
Setting of the 2 outputs. The
activation can be delayed by
up to 1 ms. By reading back
index 60FE_00
h
you can
check when the outputs are
really set.
0
00000001
h
Brake
16
00010000
h
Ready for
operation
17, 18
00060000
h
DOUT1, DOUT2