3 homing, 1 overview, Homing – Lenze 931K User Manual
Page 106: Overview, Operating modes
Operating modes
Homing
Overview
l
106
KHB 13.0002−EN 4.1
9.3
Homing
9.3.1
Overview
This chapter describes how the drive controller finds the start position (also called
reference position, home position or zero position). There are different methods to
determine this position. Sometimes the limit switches at the end of the positioning range
are used. In order to increase the reproducibility as much as possible, some methods also
integrate the zero pulse of the angle encoder used (resolver, incremental encoder etc.).
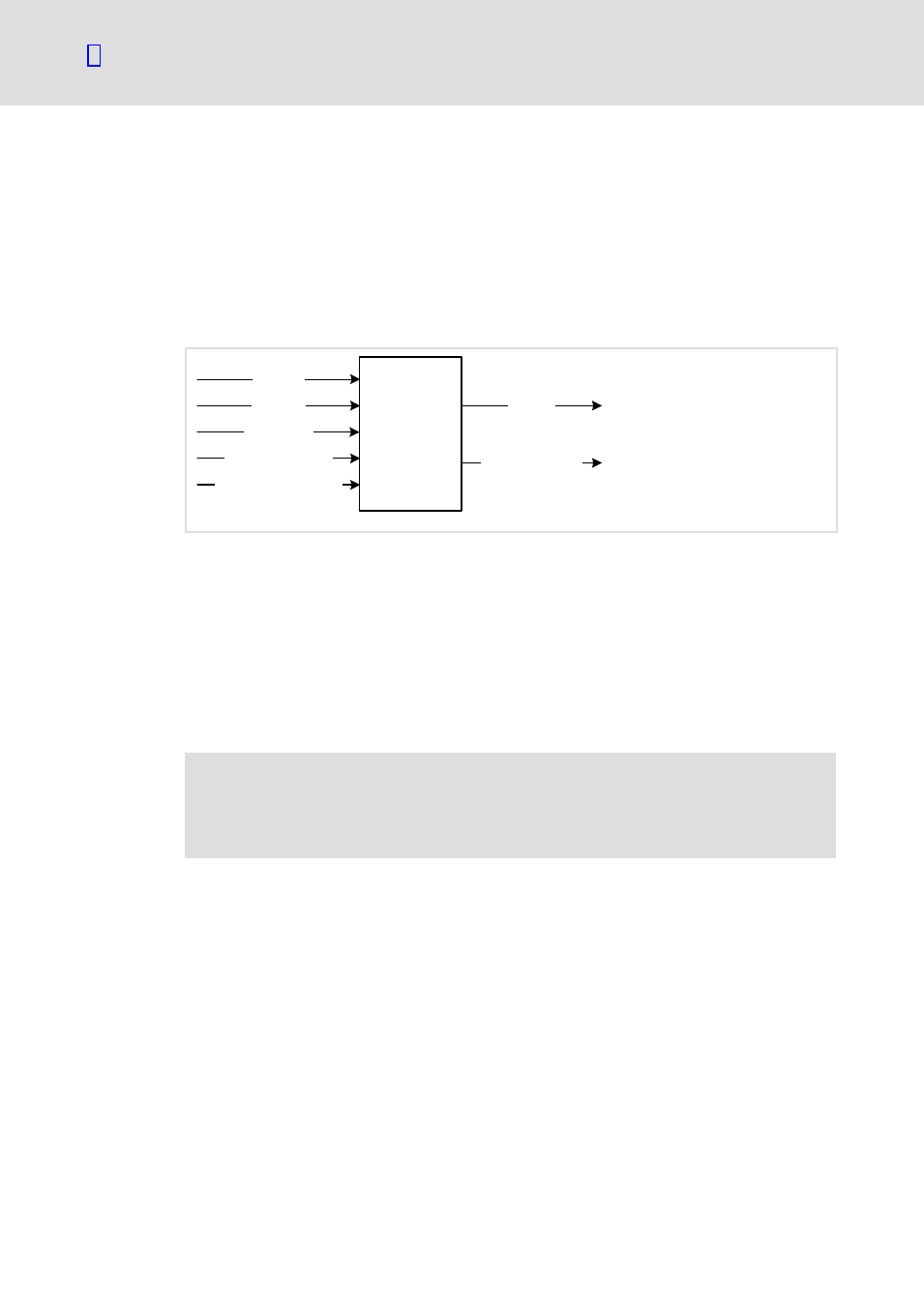
Homing
statusword
controlword
homing_method
home_speeds (only FTC)
home_acceleration (only FTC)
home_offset
position_demand_value
931e_403
Fig. 18
Homing
The user can specify the speed, acceleration and type of homing. The home_offset object
can be used to set the zero position of the drive to any position desired.
The value of the home_offset object is added to the value of the homing point (e.g. limit
switch position).
There are two homing speeds. The higher search speed is used to find the limit switch /
homing switch. In order to determine the exact position of the respective switching edge,
the system changes over to the creep speed. The speeds and accelerations are set via the
small drive control.
)
Note!
With CANopen, travelling to the zero position is usually not part of the homing
run. If the drive controller knows all parameters required (e.g. the position of
the zero pulse), no physical movement is executed.