Canopen communication, Command code – Lenze 931K User Manual
Page 20
CANopen communication
Parameter data transfer (SDO transfer)
Telegram structure
l
20
KHB 13.0002−EN 4.1
Command code
11 bits
4 bits
User data (up to 8 bytes)
1st byte
2nd byte
3rd byte
4th byte
5th byte
6th byte
7th byte
8th byte
Identifier
Data
length
Command
code
Index
low byte
Index
high byte
Subindex
Data 1
Data 2
Data 3
Data 4
Error code
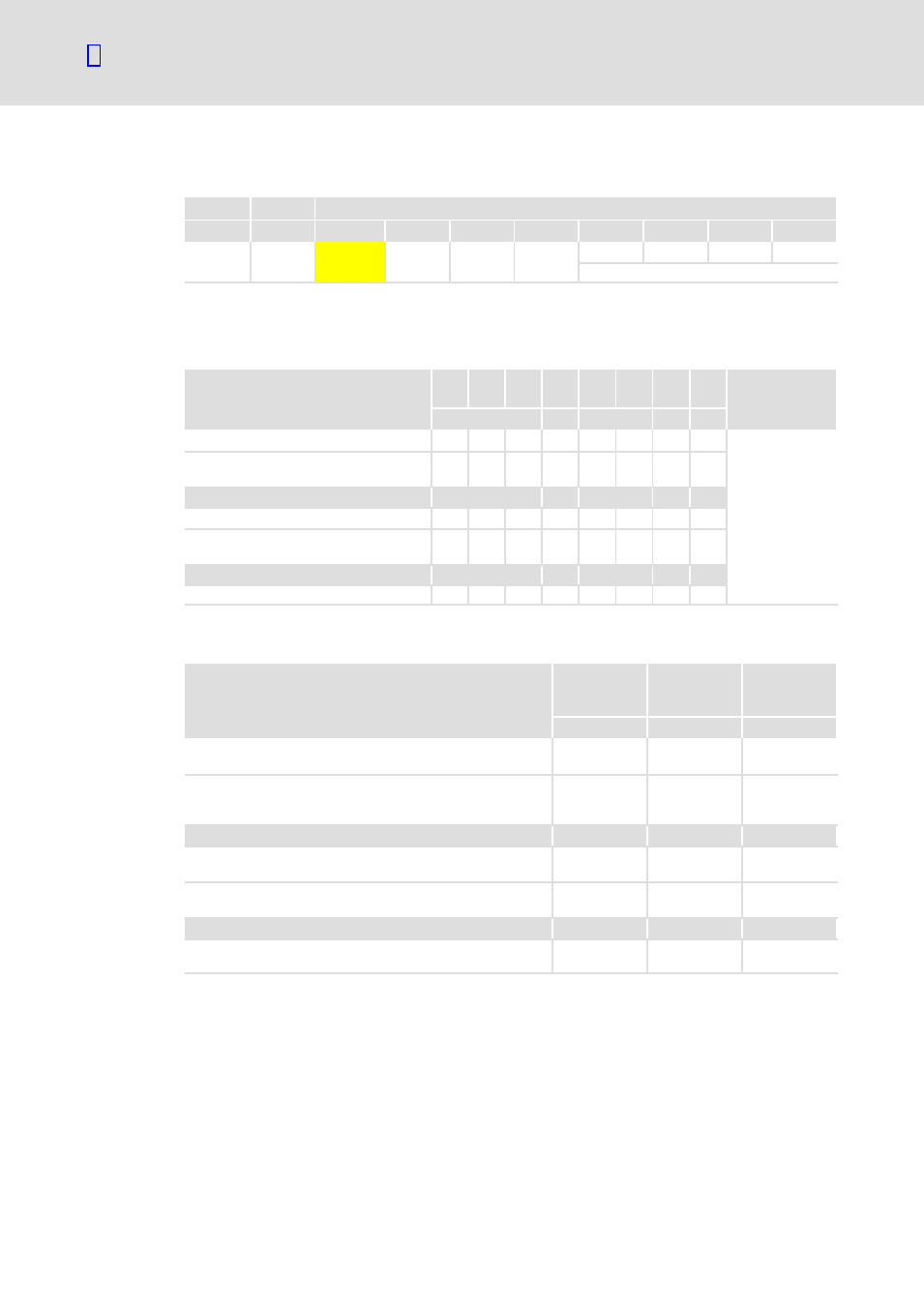
The command code contains the services for writing and reading parameters and the
information on the length of the user data.
Structure of the command code:
Write command code
Bit 7
MSB
Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
LSB
Comment
CS
0
Length
e
s
Write command / write request
0
0
1
0
x
x
1
1
CS: command
specifier
User data length
is coded in bits 2
and 3:
l
00 = 4 bytes
l
01 = 3 bytes
l
10 = 2 bytes
l
11 = 1 byte
Response to write command / write
response
0
1
1
0
x
x
0
0
Read command code
CS
0
Length
e
s
Read command / read request
0
1
0
0
x
x
0
0
Response to read command / read
response
0
1
0
0
x
x
1
1
Error command code
CS
0
Length
e
s
Error response
1
0
0
0
0
0
0
0
The command code specifies whether a value is to be read or written. The command code
also determines the data length (1 byte, 2 bytes, 4 bytes).
Write command code
4−byte data
(5th ... 8th
byte)
2−byte data
(5th and 6th
byte)
1−byte data
(5th byte)
hex
hex
hex
Write command / write request
(Send parameters to the drive)
23
2B
2F
Response to write command / write response
(Response of the drive controller to the write request
(acknowledgement))
60
60
60
Read command code
Read command / read request
(Request to read a parameter from the drive controller)
40
40
40
Response to read command / read response
(Response to the read request with the actual value)
43
4B
4F
Error command code
Error response
(The drive controller signals a communication error)
80
80
80