6 position controller (position control function), 1 overview, Position controller (position control function) – Lenze 931K User Manual
Page 82: Overview, Parameter setting
Parameter setting
Position controller (position control function)
Overview
l
82
KHB 13.0002−EN 4.1
7.6
Position controller (position control function)
7.6.1
Overview
This chapter describes all parameters required for the position controller. The position
setpoint (position_demand_value) from the trajectory generator is applied to the input of
the position controller. In addition, the position controller is fed with the actual position
(position_actual_value) from the angle encoder (resolver, incremental encoder, etc.). The
behaviour of the position controller can be influenced by parameters. To keep the position
control loop stable, the output quantity can be limited (control_effort). The output
quantity is fed to the speed controller as the speed setpoint. All input and output
quantities of the position controller are converted from the application−specific units to
the corresponding internal units of the drive controller in the factor group. The internal
quantities are marked with an asterisk.
The following subfunctions are defined in this chapter:
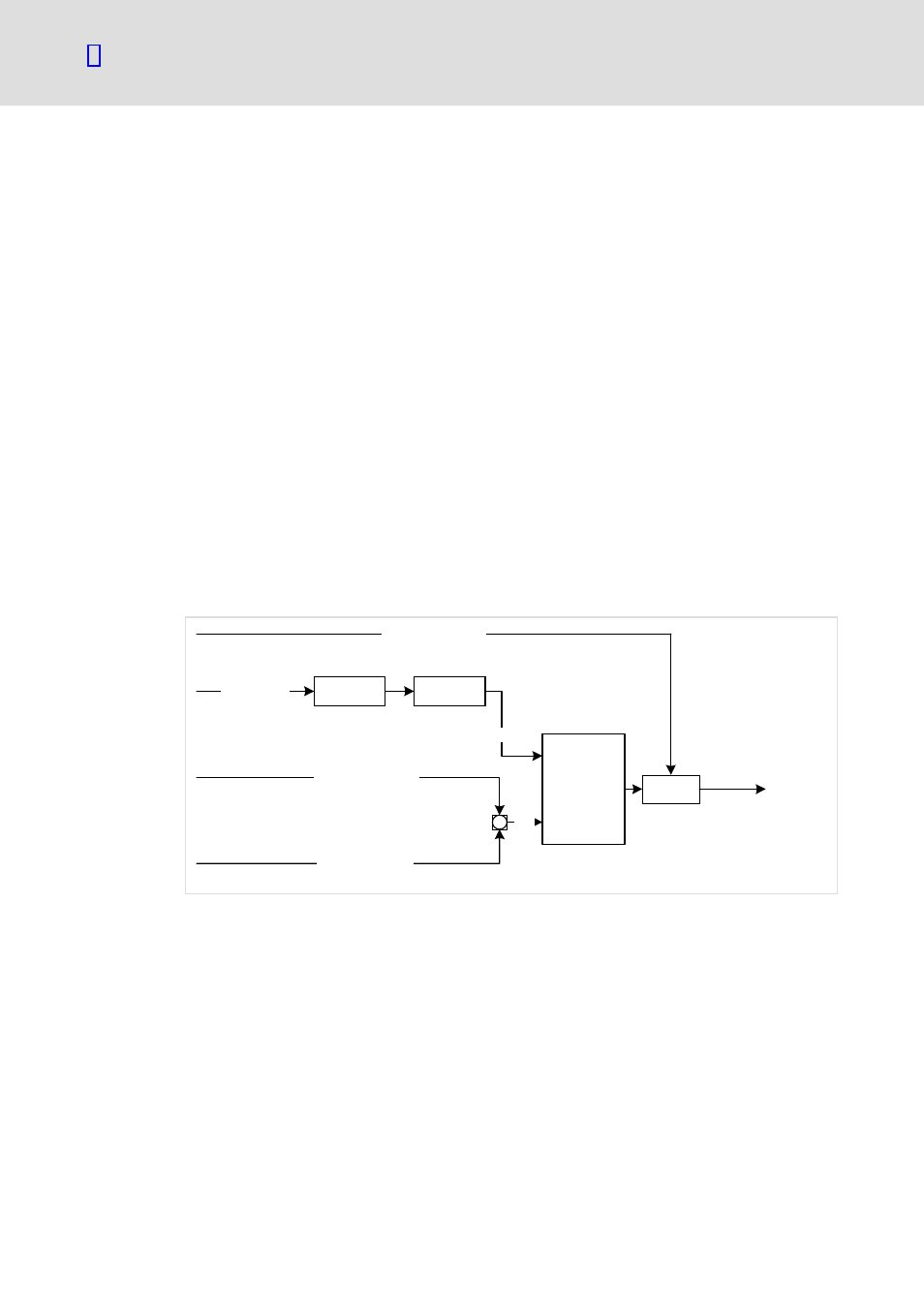
1. Following error (Following_Error)
The following error is the deviation of the actual position (position_actual_value) from the
position setpoint (position_demand_value). If this following error exceeds the value
specified in the following error window (following_error_window) for a certain time, bit
13 following_error of the status word object is set. The permissible time interval can be
defined via the following_error_time_out object.
Limit
Function
following_error_time_out
(6066h)
following_error_
window
(6067h)
[position units]
home_offset (607Ch)
position_factor (6093h)
polarity (607Eh)
[inc]
Multiplier
position_actual_value*
(6063h)
-
[inc]
Timer
Windows
Comparator
following_error
status_word
(6041h)
position_demand_value*
931e_416
Fig. 12
Following error − functional survey