Commissioning – Lenze 931K User Manual
Page 60
Commissioning
Speed control
Parameterising of the motor and the current controller
l
60
KHB 13.0002−EN 4.1
6.2.2
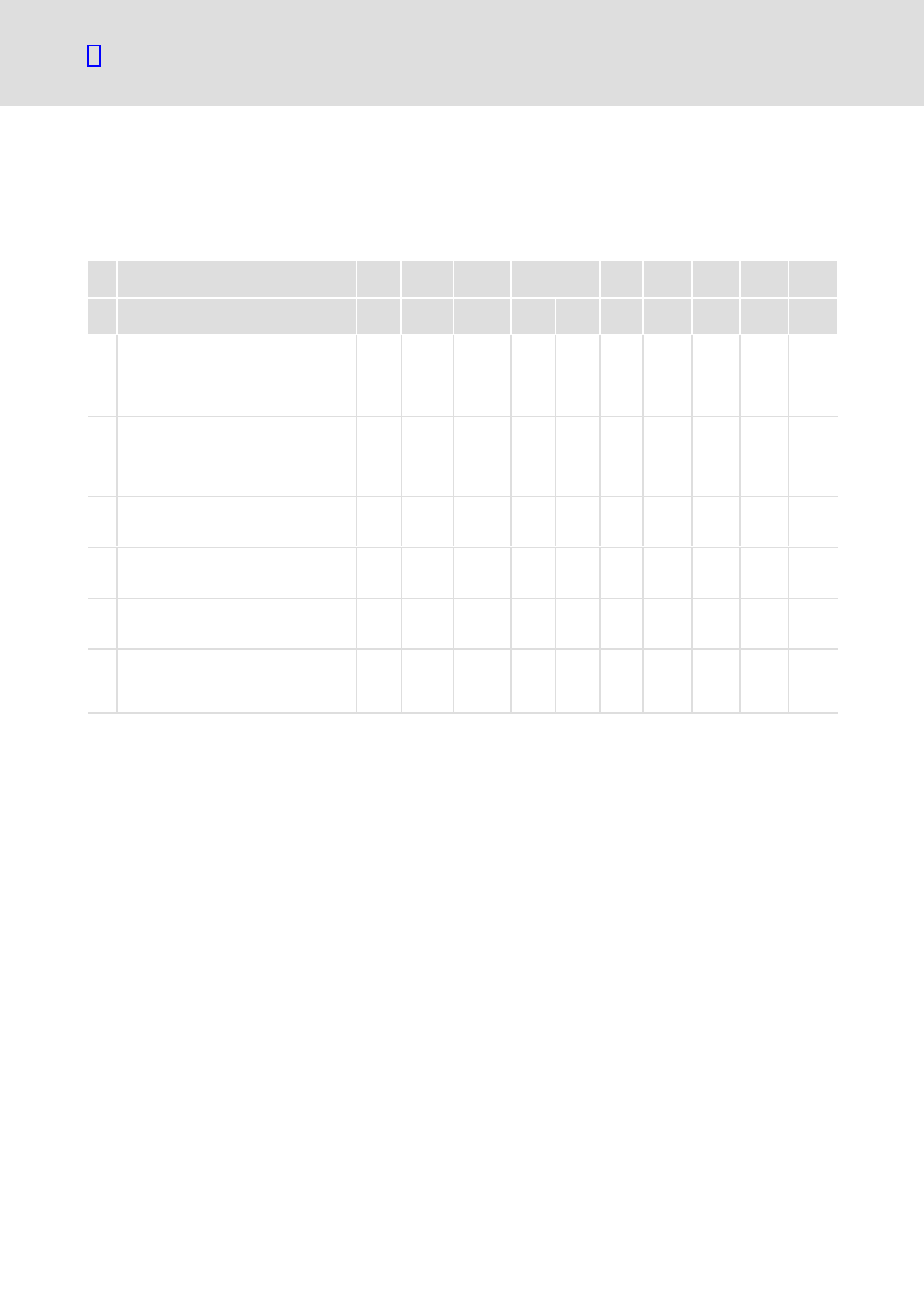
Parameterising of the motor and the current controller
In addition to the motor parameters (rated current, number of pole pairs), the
safety−relevant parameters (max. current, i
2
t tripping criterion) also have to be specified
in advance. The current controller parameters can be adapted as well.
No. Description
Identi
fier
Control
field
Comma
nd code
Index
Subin
dex
Data 1 Data 2 Data 3 Data 4
Data
length
Low
byte
High
byte
1
Entry of the rated motor current
The rated motor current
(motor_rated_current) is entered in mA
(example: 5000 mA corresponds to
1388
h
)
601
8
23
75
60
00
88
13
00
00
2
Definition of the maximum current
To restrict the current (max_current) /
the maximum torque, the current is
limited to twice the rated motor current
(corresponds to 2000 / 07D0
h
).
601
6
2B
73
60
00
D0
07
00
00
3
Definition of the number of poles
For a 2−pole−pair motor, the number of
poles (pole_number) is 4.
601
5
2F
4D
60
00
04
00
00
00
4
Setting of the i
2
t tripping time
The tripping time (iit_ratio_time) is set
to 5000 ms (corresponds to 1388
h
).
601
6
2B
10
64
03
88
13
00
00
5
Setting of the current controller (K
p
)
A gain (torque_control_gain) of K
p
= 2
(corresponds to 0200
h
) is selected.
601
6
2B
2F
60
01
00
02
00
00
6
Setting of the current controller (T
n
)
A reset time (torque_control_time) of
T
n
= 10 ms (corresponds to 2710
h
) is
selected.
601
6
2B
F6
60
02
10
27
00
00
Tab. 4
Example of parameterising the current controller and the motor type