Safety engineering, Safety functions safe maximum speed – Lenze E94AYAE SM301 User Manual
Page 69
Safety engineering
Safety functions
Safe maximum speed
l
69
EDS94AYAE EN 7.0
1.3.8.3
Fault analysis
This consideration applies to the SMS and SLS functions.
The evaluation and plausibility of the speed values is done in a cycle of 2 ms.
If the defined limit values are exceeded, the parameterised error response is activated
within a time slot of maximally one evaluation cycle. With the error response SS1 or SS2
the response time of the stop function depends on the evaluation in the standard device.
Moreover, the set stopping time must be added to the response time until the defined
operating status is reached.
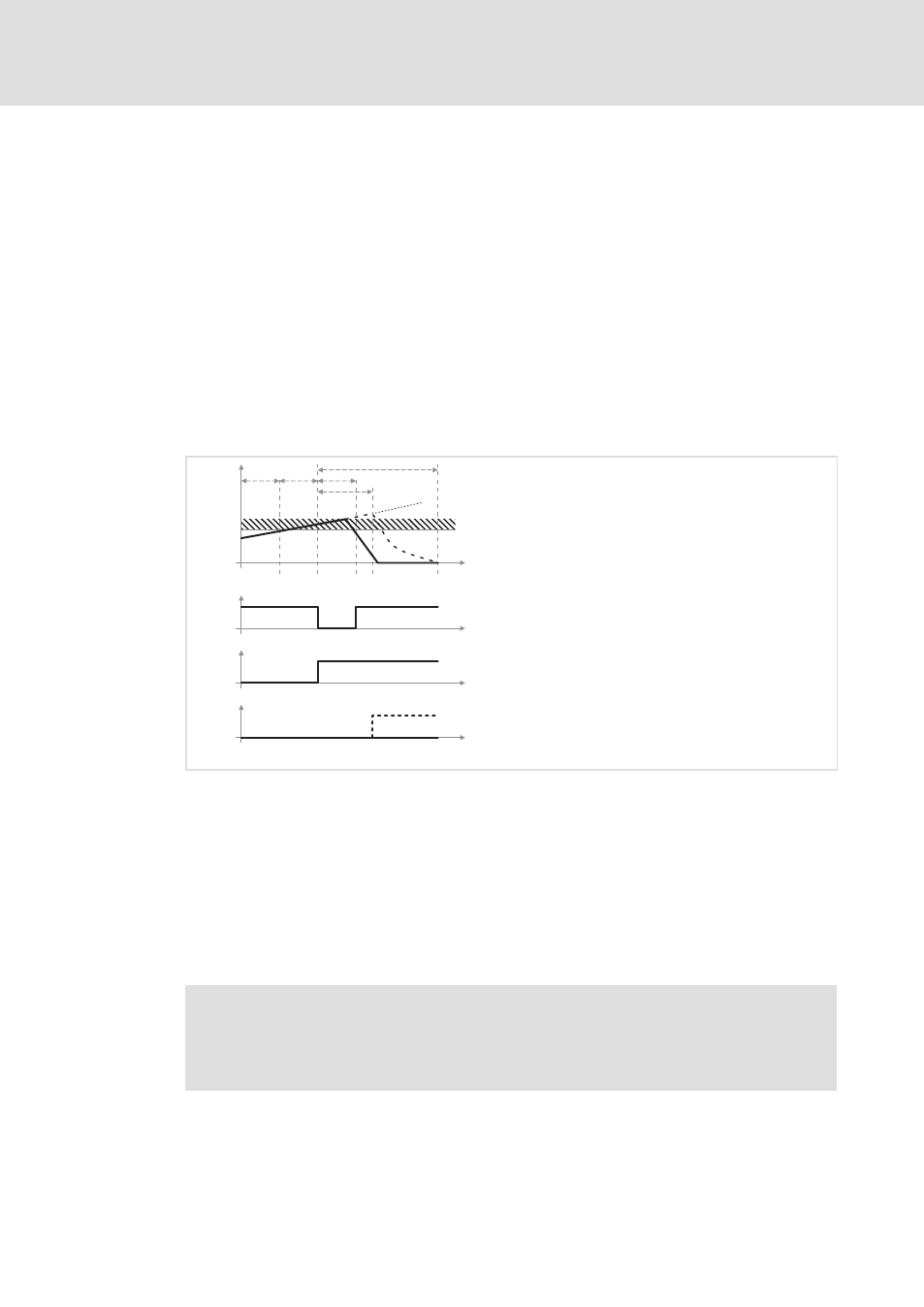
In order that the response can be checked for an error as quickly as possible, a maximum
response time (C15350) can be parameterised. Before the maximum response time has
elapsed, the detected speed must comply with the permissible (monitored) speed. If the
permissible (monitored) speed is not complied with, STO is activated immediately.
t
t
t
t
STO
SLS
0
0
0
I
I
I
2
t
R
t
S
t
C
t1
t3
t2
n
SM301DIA_F
T1
Occurrence of the error event
t
C
Cycle time 2 ms
T2
Determining the error event
t
R
Maximum permissible response time (parameterisable)
t3
Response instance to continuous exceedance
t
S
Stopping time
2
Feedback(s)
SLS
SLS monitored
According to the error response set: SS2, SS1 or STO
STO
Response in case of an error after the max. response time has elapsed
––––
Normal operation
−−−−−−
Incorrect operation
)
Note!
If the STO function has been selected as the error response for SMS or SLS, the
internal response time is not considered because the motor is already coasting
after the speed threshold is exceeded for the first time.