Safety engineering – Lenze E94AYAE SM301 User Manual
Page 47
Safety engineering
Device modules
Safe speed measurement and position detection
l
47
EDS94AYAE EN 7.0
Index:
Data type:
Name:
Parameter:
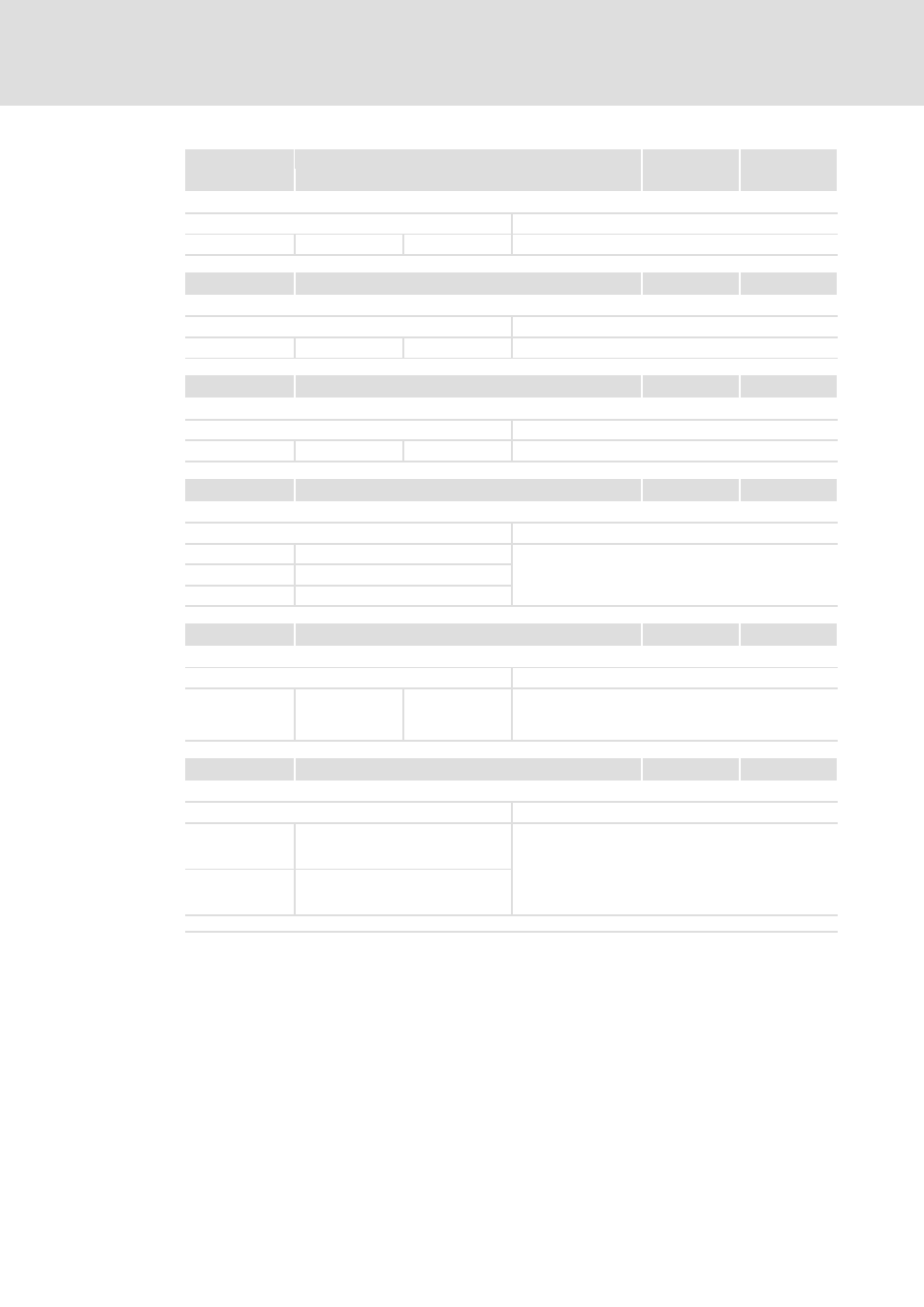
C15411
Tolerance of speed comparison
UNSIGNED_16
9164
d
= 23CC
h
Tolerance of the speed comparison in the safety module
Display area
(min. value | unit | max. value)
Information
0
rpm
16000
(From SM301 V1.3)
þ Read access } Write access o Controller inhibit o PLC-STOP o No transfer
C15420
Number of increments − sin/cos encoder
UNSIGNED_16
9155
d
= 23C3
h
Number of increments of the sin/cos encoder used
Setting range
(min. value | unit | max. value)
Information
1
16384 Lenze: 1
þ Read access } Write access o Controller inhibit o PLC-STOP o No transfer
C15430
Number of pole pairs of resolver
UNSIGNED_8
9145
d
= 23B9
h
Number of pole pairs of the used resolver
Setting range
(min. value | unit | max. value)
Information
1
10 Lenze: 1
(From SM301 V1.3)
þ Read access } Write access o Controller inhibit o PLC-STOP o No transfer
C15500
Position encoder system
UNSIGNED_8
9075
d
= 2373
h
Setting of the connected position encoder system
Selection list
(read only)
Information
0 No position encoder
(From SM301 V1.3)
1 Analog encoder (Sin−Cos/TTL)
2 Digital encoder (SSI/BUS)
þ Read access } Write access o Controller inhibit o PLC-STOP o No transfer
C15501
Position encoder − gearbox factor
UNSIGNED_16
9074
d
= 2372
h
Setting of the gearbox factor between motor and position encoder
Display area
(min. value | unit | max. value)
Information
20
%
50000 Lenze: 100
(From SM301 V1.3)
100
º i = 1.00
2543
º i = 25.43
þ Read access } Write access o Controller inhibit o PLC-STOP o No transfer
C15502
Position encoder − mounting direction
UNSIGNED_8
9073
d
= 2371
h
Setting of the mounting direction of the position encoder regarding the motor encoder
Selection list
(read only)
Information
0 Like motor encoder
(From SM301 V1.3)
If the mounting directions of the motor (C02527/0)
and position encoder (C02529/0) in the standard
device are set in different directions of rotation, this
parameter must be set to "inverted to the motor
encoder".
1 Inverted to the motor encoder
þ Read access } Write access o Controller inhibit o PLC-STOP o No transfer