2 speed controller parameters, Speed controller parameters -3 – ElmoMC SimplIQ Software Manual User Manual
Page 221
SimplIQ
Software Manual
The Controller
MAN-SIMSW (Ver. 1.4)
15-3
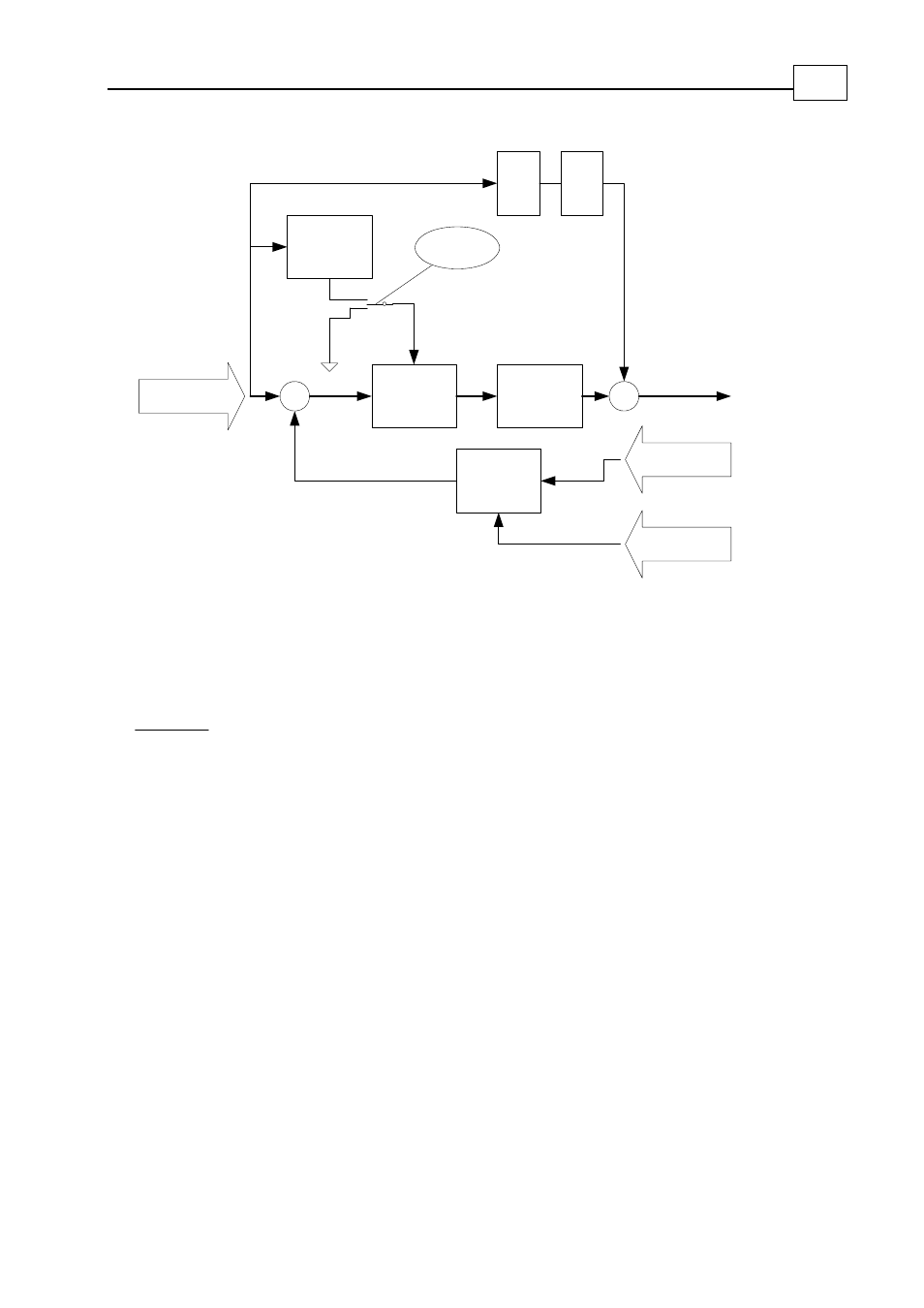
DV[2]
Σ
Speed com m and
-
Torquecom m and
(DV[1], Am p)
Speed
controller:
KP,KI
High order
filter
Σ
FF[1]
d/dt
Autom atic
Controller
Selector
0
Fixed if
GS[2]=0
Position sensor
Speed
Estim ator
Encoder pulse
tim er
Speed feedback
Figure
15-1: Speed Controller Block Diagram
15.1.2 Speed Controller Parameters
The basic continuous-time PI controller is:
s
s
K
K
P
I
+
where:
K
I
is the integral parameter.
K
P
is the proportional parameter.
When using the scheduler, K
I
and K
P
are functions of time. When not using the gain
scheduler, they are fixed.
The input to the PI element is the speed error e
SPEED
(t) [Internal speed units]:
)
(
)
(
)
(
t
ack
SpeedFeedb
t
nd
SpeedComma
t
e
SPEED
−
=
The output to the current command I(t) in ampere units is:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⋅
⋅
+
⋅
=
∫
)
(
)
(
)
(
)
(
0
t
p
t
e
K
d
e
K
K
t
I
SPEED
P
t
SPEED
I
Speed
τ
τ