4 enable switch, 4 enable switch -6 – ElmoMC SimplIQ Software Manual User Manual
Page 201
SimplIQ
Software Manual
Limits, Protections, Faults and Diagnosis
MAN-SIMSW (Ver. 1.4)
13-6
0
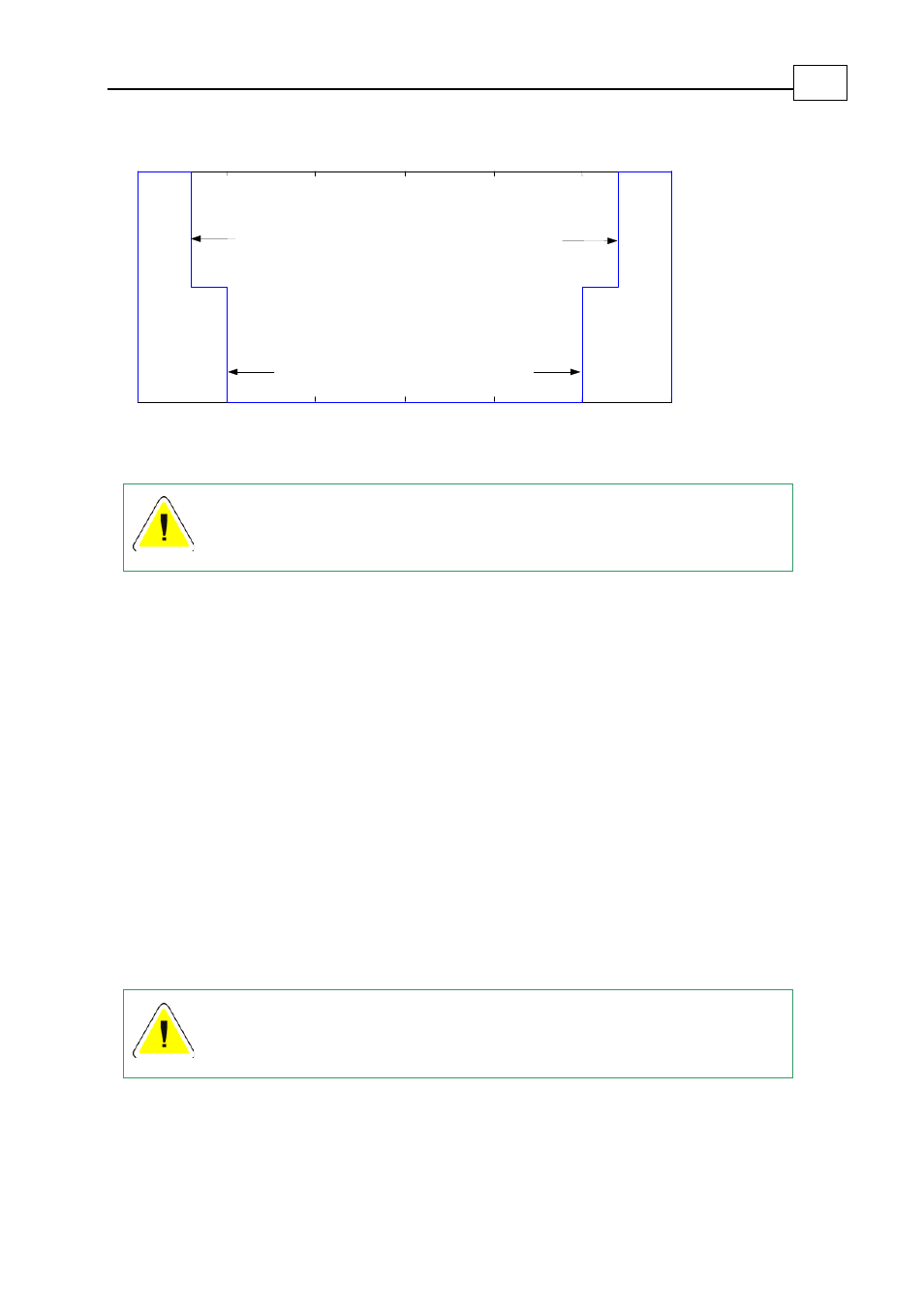
W ith in p o s itio n co m m a n d a n d
fe e d b a c k lim its
V L [3 ]
V H [3 ]
L L [3 ]
H L [3 ]
P o s itio n w ith in fe e d b a ck lim its, o u t o f
co m m a n d lim its
A b o rt
A re a
A b o rt
A re a
O ve r-
sh o o t
A re a
O ve r-
s h o o t
A re a
Figure
13-3: Position Command and Feedback Limits
Remember that when the drive shuts down due to an exception, the motor
will continue to run on its own inertia unless brakes are used (refer to
section
In order to avoid spurious motor shutdowns, always:
Specify the largest ER[3] that can be tolerated.
Leave large enough space between VH[3] and HL[3], and between VL[3] and LL[3],
to allow for speed overshoots.
13.4 Enable Switch
One of the digital inputs can be programmed as an “Inhibit; digital input programming is
described in detail in the IL command section of the
SimplIQ
Command Reference Manual.
When an Inhibit input is active:
If the motor is off, MO=1 will not start the motor.
If the motor is on, MO=0 is set immediately. If the motor is rotating at high speed, the
inhibit function may be unsafe, because the motor may continue to run uncontrolled
on its own inertia.
When an Inhibit input is inactive, MO=1 will start the motor if the motor is off.
For safety reasons, it is recommended to program the Inhibit function as
“active low” in order to prevent accidental motor starts when the input pin
is disconnected, or when its driving source is powered down.