5 unit mode 5: single feedback mode, 5 unit mode 5: single feedback mode -11, Simpliq – ElmoMC SimplIQ Software Manual User Manual
Page 141: Figure
SimplIQ
Software Manual
Unit Modes
MAN-SIMSW (Ver. 1.4)
10-11
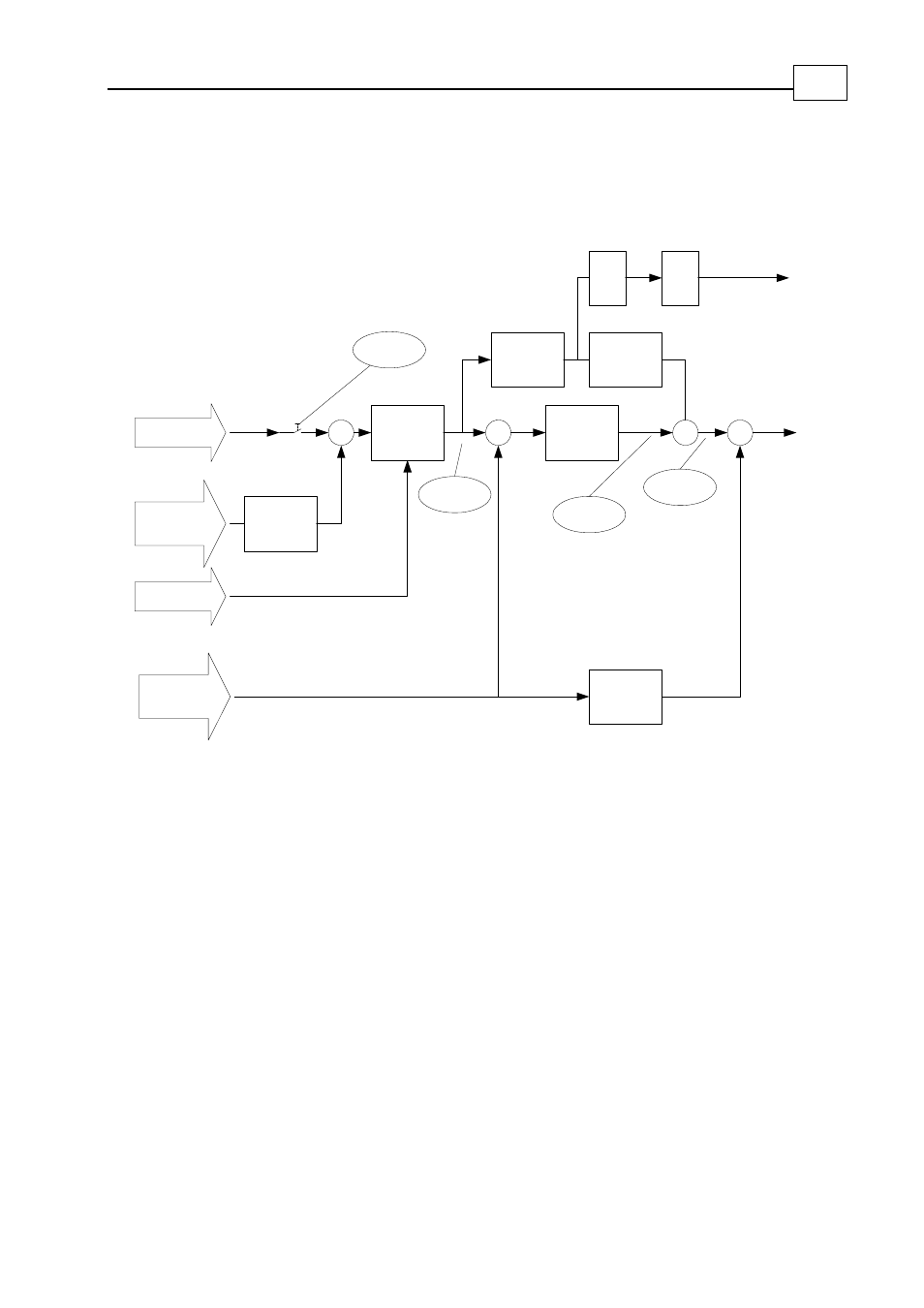
10.5 Unit Mode 5: Single Feedback Mode
Single feedback mode is used when the same sensor is used for speed, commutation and
position. This situation is common with sensors that contain a single position sensor.
Software
position
com m and
Σ
Enable if
RM==1
Auxiliary position
com m and
Stop
m anager
Stop and lim it
switches
Sm oother
d/dt
Position
Controller
FF[2]
Σ
Σ
m ain feedback
encoder
Speed
Estim ator
-
-
Σ
DV[3]
DV[2]
Speed
Error, for the
speed controller
d/dt
Acceleration
feed forward
FF[1]
Position
correction
Figure
10-10: Single Feedback Mode (UM=5)
The position and speed command are generated by:
The position software command generator
The position auxiliary command generator
The position stop manager
The generation of the position and speed commands is described in
Chapter 11
.
The speed command, multiplied by the gain F[2], is fed as reference to the speed
controller, in addition to position correction. Setting FF[2] exactly to unity prevents
steady-state constant-speed tracking errors. The acceleration of the position command,
multiplied by FF[1], can be injected directly as a torque command. By default, FF[1]=0.
The reference values to the position, speed and torque controllers can be queried by
DV[3], DV[2] and DV[1] respectively.