2 more complex ptp motions, Simpliq – ElmoMC SimplIQ Software Manual User Manual
Page 147
SimplIQ
Software Manual
The Position Reference Generator
MAN-SIMSW (Ver. 1.4)
11-6
0
0.01
0.02
0.03
0.04
0.05
0.06
0
1000
2000
0
0.01
0.02
0.03
0.04
0.05
0.06
0
50
100
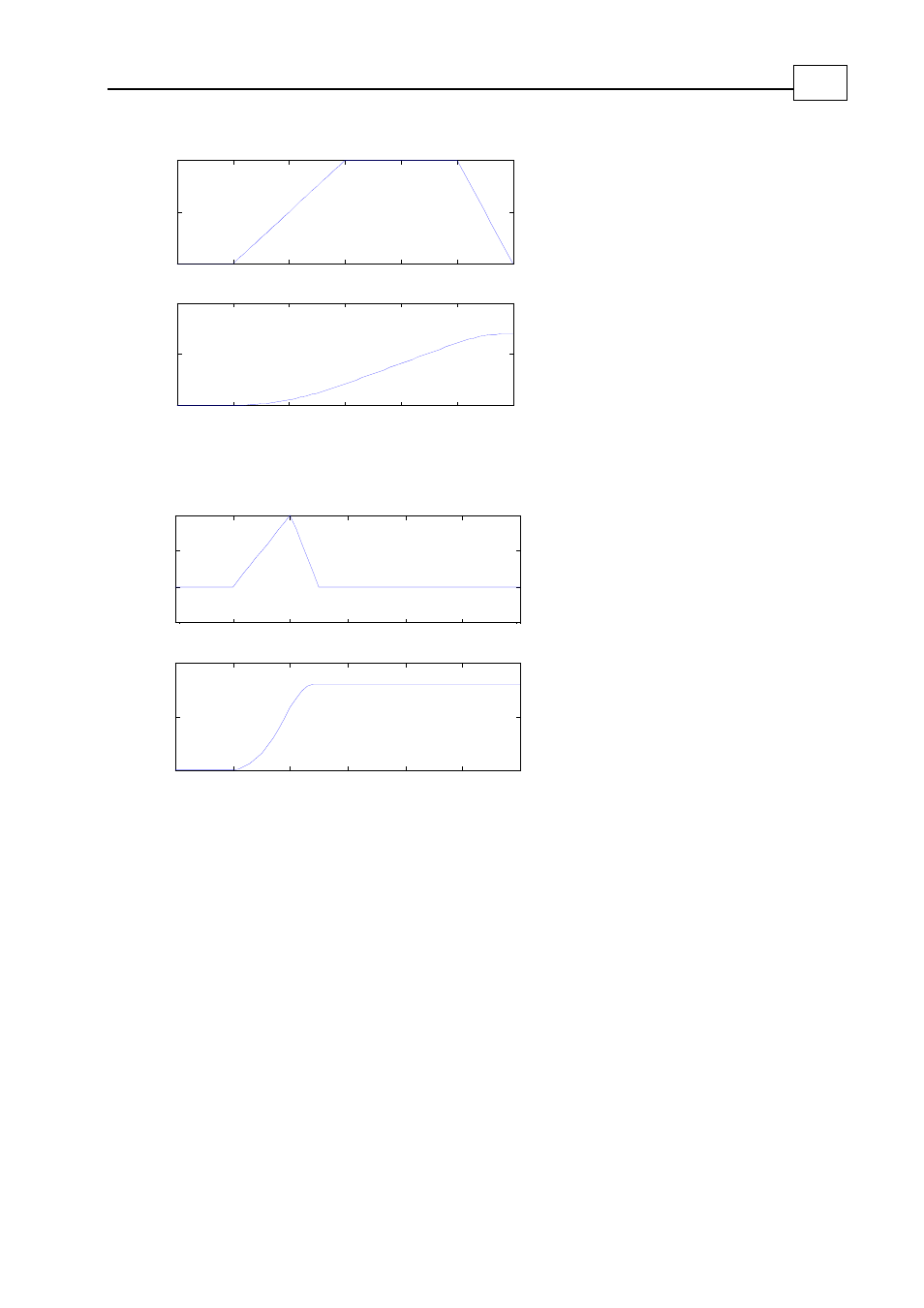
S peed
A cceleration
(A C )
C onstant speed
(S P )
D eceleration
(D C )
P osition
With shorter movement, the deceleration begins before the speed limit is reached, so that the
SP speed limit is not effective. This situation is depicted in the following figure:
0
0.01
0.02
0.03
0.04
0.05
0.06
-500
0
500
1000
0
0.01
0.02
0.03
0.04
0.05
0.06
0
5
10
A C
D C
Time (sec)
Time (sec)
S peed
P osition
11.1.4.2 More Complex PTP Motions
PTP motions may be initiated any time, using the PA command, but not necessarily from
a stationary state. The PTP decisions, made every position control cycle, are described in
the following flowchart. All parameters in the flowchart — including AC, DC, SP and
position target — are updated by a BG command, or by its hardware-activated
equivalent.