3 stop management, Stop management -6 – ElmoMC SimplIQ Software Manual User Manual
Page 136
SimplIQ
Software Manual
Unit Modes
MAN-SIMSW (Ver. 1.4)
10-6
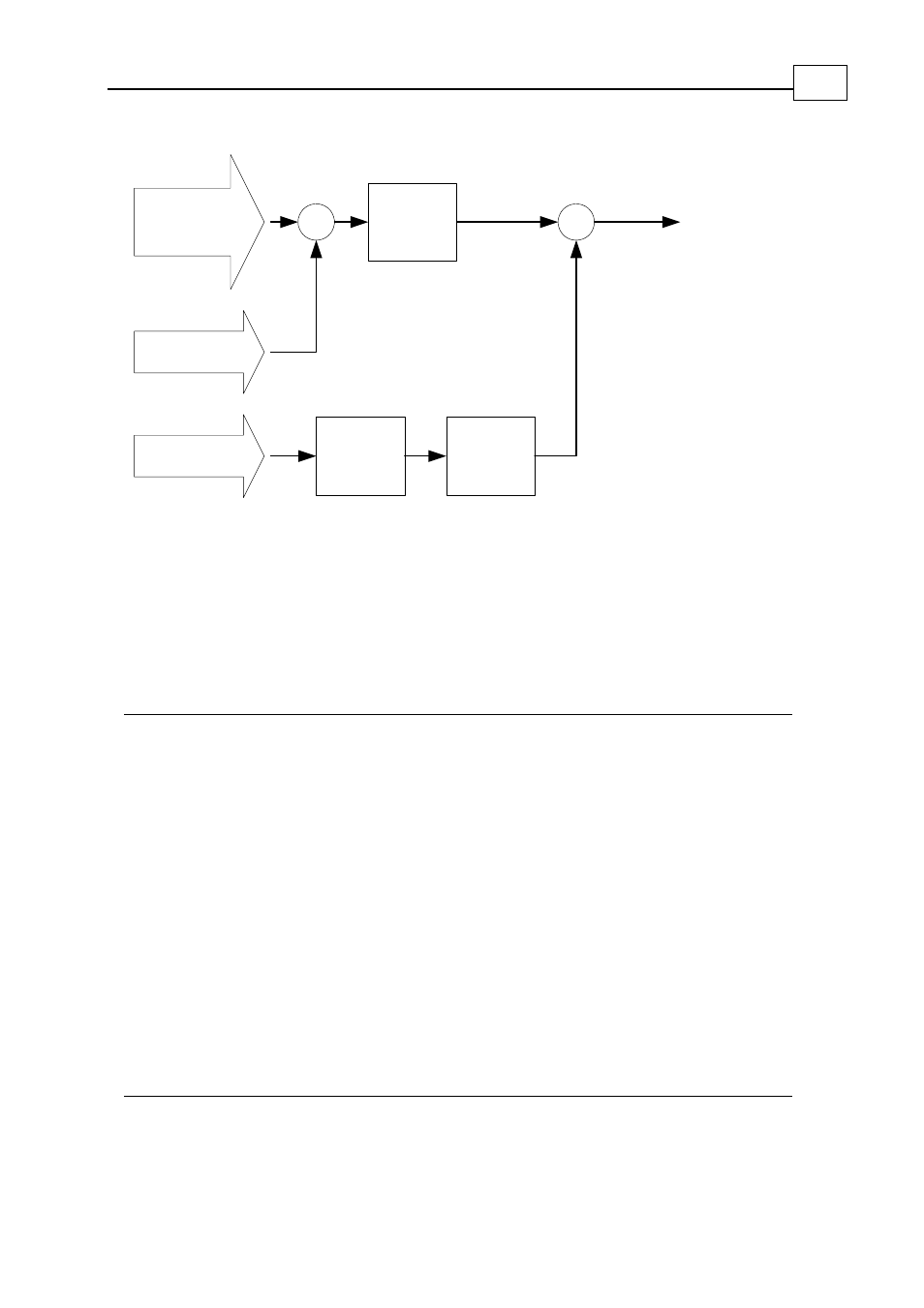
Auxiliary input
Analog input 1
)
-
10 to 10 Volts(
AG ]
2
[
Count/sec/
Volt
Σ
Auxiliary speed command
Σ
AS ]
1
[
-
Speed
estimator
FR ]
2
[
Figure
10-5: Auxiliary Speed Command Generation
The analog input is most useful when the
SimplIQ
drive serves as an inner controller,
embedded in an external control loop. The auxiliary encoder speed input enables the
drive to issue speed commands relative to a conveyor or other moving object.
The filter is optional. You can design a linear arbitrary filter of an order up to 4, and use it
to filter the analog input for extra smoothness. The parameters of the filter are as follows:
Parameter Description
KV[88]
0: Do not use a filter (the filter is replaced by a unity gain).
100: Use the filter. KV[88]=100 synchronously enters all filter
parameters KV[89]…KV[99].
10.2.3 Stop Management
The stop manager performs the following functions:
Brings the motor to a stop upon a software or hardware ST command
Brings the motor to a stop when the speed demand is positive and FLS (Forward
Limit Switch) is active
Brings the motor to a stop when the speed demand is negative and RLS (Reverse
Limit Switch) is active
Prevents acceleration or deceleration beyond the motor torque limits
The parameters relevant to the stop manager are:
Parameters Description
SD
Maximum motor acceleration/deceleration, in counts/second
2
VL[2], VH[2]
Speed command limit
IL[N]
Input logic: defines digital inputs as hard stop or as direction limit