Chapter 10: unit modes, 1 unit mode 1: torque control, Chapter 10: unit modes -1 – ElmoMC SimplIQ Software Manual User Manual
Page 131: 1 unit mode 1: torque control -1, Simpliq
SimplIQ
Software Manual
MAN-SIMSW (Ver. 1.4)
10-1
Chapter 10: Unit Modes
The
SimplIQ
drive’s feedback can be structured in a number of different ways. These
options are called “unit modes” and are programmed by the UM parameter. The unit
mode can be switched only with the motor turned off, because the feedback structure
must be rearranged for each different mode. The following unit modes are available:
Value Description
(Related
Commands)
1 Torque
control
mode
2
Speed control mode
3 Micro-stepper
mode
4
Dual feedback position control mode
5
Single feedback position control mode
Table
10-1: Unit Modes
10.1 Unit Mode 1: Torque Control
In this mode, the drive controls the motor torque only. The drive may serve as a torque
driver, controlled by an external controller, with commutation performed to achieve the
maximum torque for the defined motor current.
If position sensors are connected, the position and speed are evaluated so that the drive
will abort upon over-speed, as specified by parameters LL[2] and HL[2].
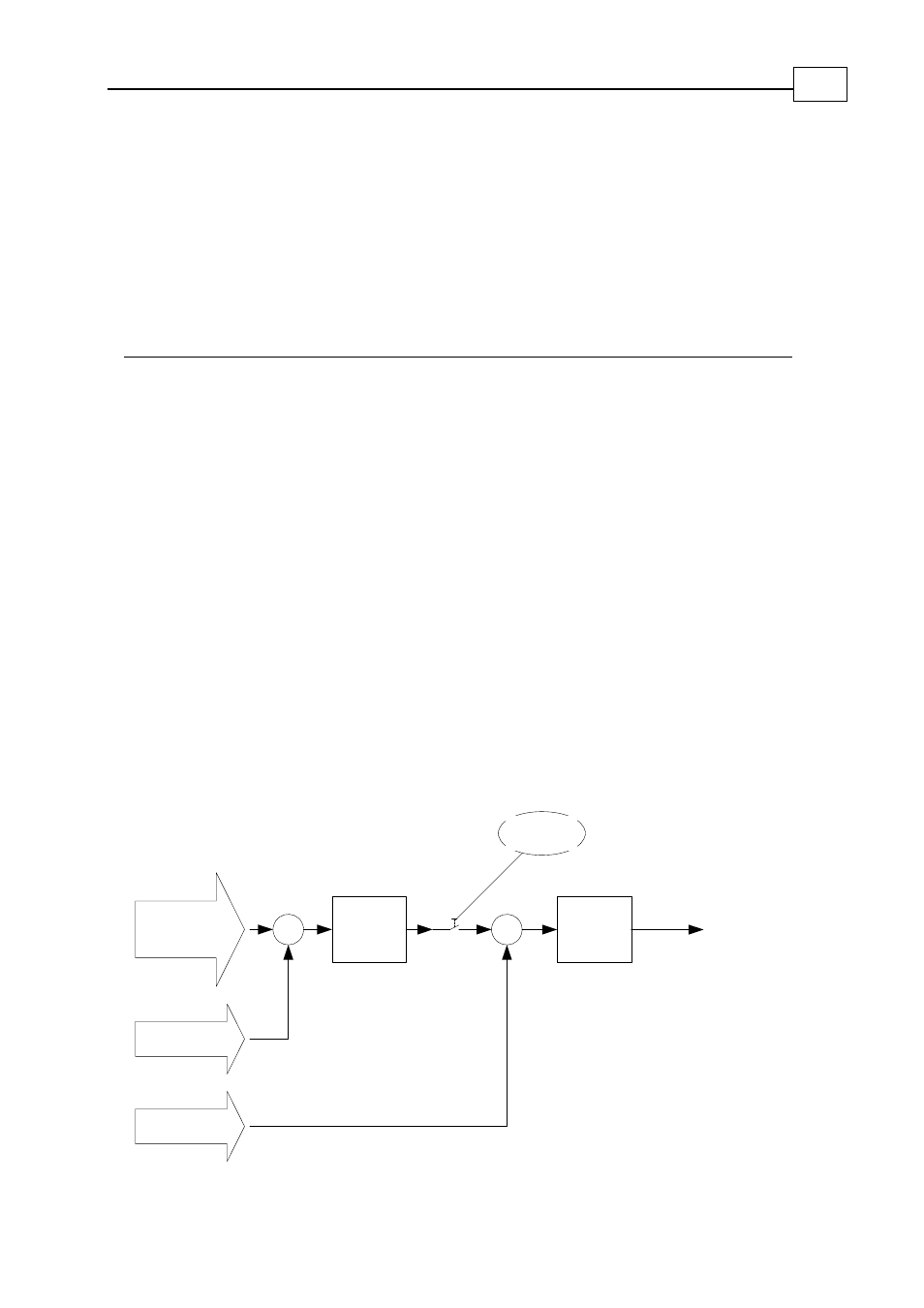
The torque command may be set by a software command, an analog input or a
combination of the two, according to the following figure:
TC
Analog input 1
)
-
10 to 10 Volts(
AG ]
1
[
Amp/Volt
Σ
Enable if RM
==
1
Torque command
)DV
]
1
[
, Amp(
Σ
AS ]
1
[
-
Stop
Manager
Figure
10-1: Unit Mode 1 (Torque) Structure