4 unit mode 4: dual feedback mode, 4 unit mode 4: dual feedback mode -9, Simpliq – ElmoMC SimplIQ Software Manual User Manual
Page 139
SimplIQ
Software Manual
Unit Modes
MAN-SIMSW (Ver. 1.4)
10-9
Software
position
com m and
Σ
Enable if
RM==1
Stepper angle
com m and
W S[20]
Torquecom m and
(DV[1], Am p)
Auxiliary position
com m and
Stop
m anager
Stop and lim it
switches
Sm oother
Torque
com m and
Current
controller
1024 count
per electrical rev.
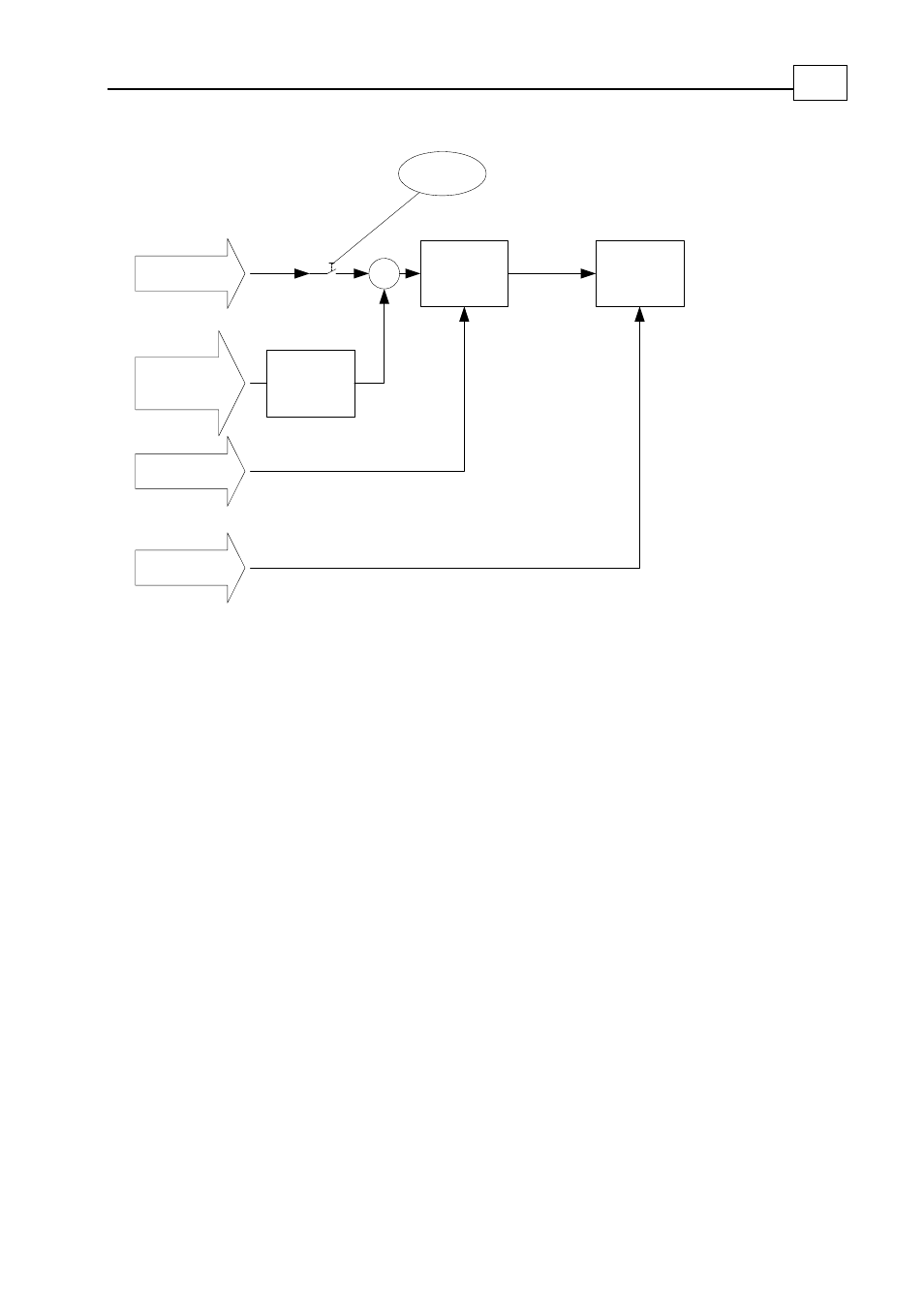
Figure
10-8: Stepper Mode (UM=3)
The stepper angle command is generated by:
The position software command generator
The position auxiliary command generator
The position stop manager
The generation of the stepper angle command is similar to position command generation
in UM=5. The torque command is simply given by the TC command.
10.4 Unit Mode 4: Dual Feedback Mode
Dual feedback mode is used when different sensors are used for speed/commutation and
for position. This is a mode commonly used when the motor drives the load through a
reduction gear. The controlled position is that of the load. However, the load position
may not be appropriate for commutation or speed feedback because:
The commutation accuracy is limited by backlash and gear compliance.
The motor speed can be measured with better resolution and less delay since the
motor rotates much faster than the load. In addition, the speed sensor is not subject to
dead zones caused by backlash.