2 unit mode 2: speed control, 2 unit mode 2: speed control -2, Simpliq – ElmoMC SimplIQ Software Manual User Manual
Page 132
SimplIQ
Software Manual
Unit Modes
MAN-SIMSW (Ver. 1.4)
10-2
The AS[1] parameter compensates for possible offsets in the driving equipment and
internally in the
SimplIQ
drive. If you do not use the analog input for the torque
command, set AG[1] = 0 or RM = 0 in order to avoid the noises and offset that affect the
drive torque command.
The combined (software and analog input) current demand is reported by DV[1].
The Stop Manager does the following:
If hard stop is active, sets the torque command to zero
If RLS is active, clips negative torque commands to zero
If FLS is active, clips positive torque commands to zero
The Stop Manager does not affect the reference generator: When the relevant switch is
released, the torque command value set by the reference generator is restored.
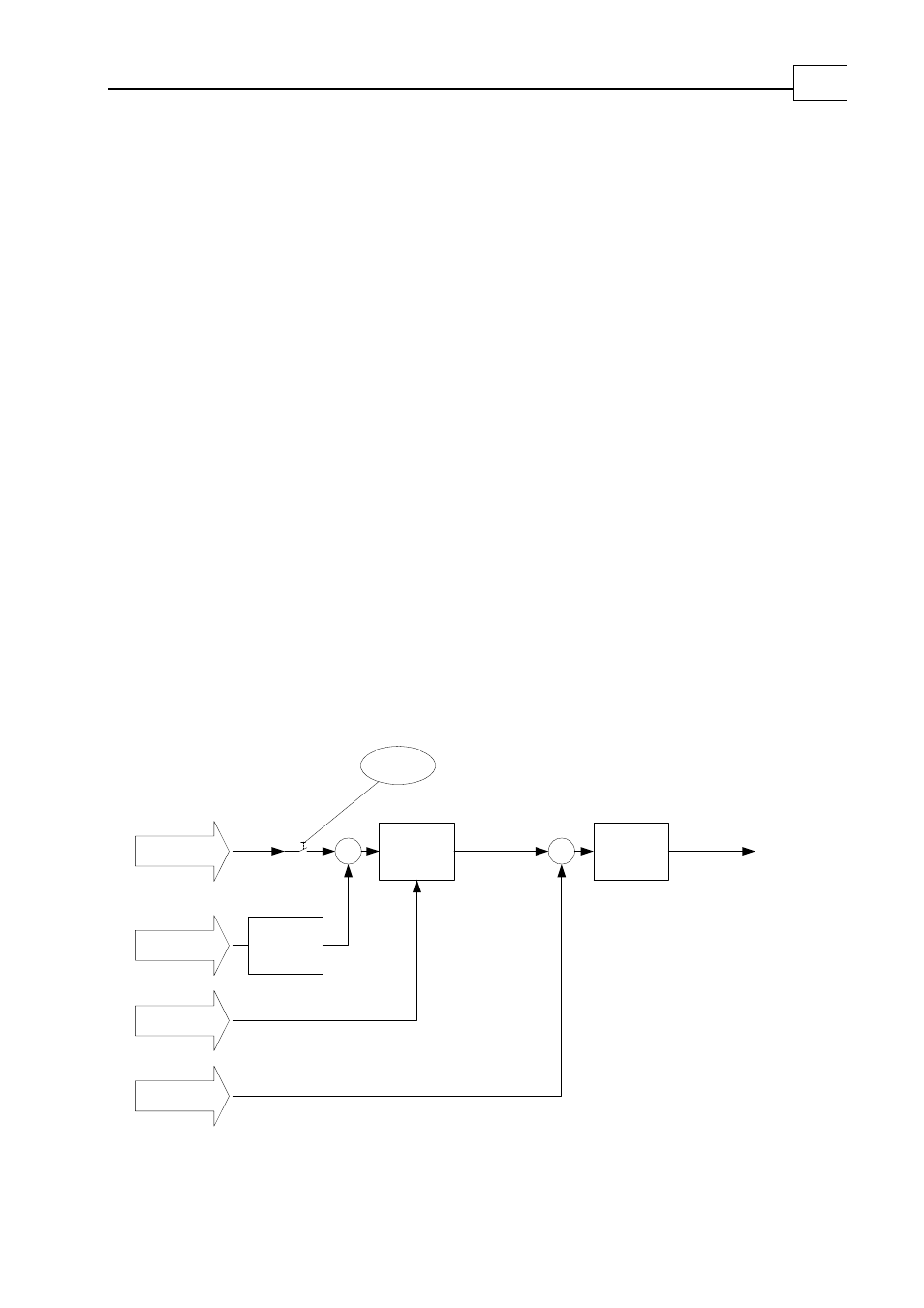
10.2 Unit Mode 2: Speed Control
In this mode, the drive controls the motor speed by feedback. The speed controller
demands torque from the current controller.
The reference to the speed controller is a sum of software commands and an auxiliary
speed command that is derived using the analog input, the auxiliary encoder input and
the ECAM table (details in
).
The Stop digital input and the limit switches (RLS, FLS) can be used to stop or to limit the
direction of the motor (described in
section
). The drive will abort upon over-speed,
as specified by the parameters LL[2] and HL[2]. The speed control scheme can be
depicted as follows:
Software speed
command
Σ
Enable if
RM==1
Speed command
(DV[2], cnt/sec)
Σ
Software speed
feedback
-
Torque command
(DV[1], Amp)
Auxiliary speed
command
Stop
manager
Stop and limit
switches
Smoother
Speed
controller
DV[4]
DV[5]
Figure
10-2: Unit Mode 2 (Speed) Structure