1 follower, Follower -30, Simpliq – ElmoMC SimplIQ Software Manual User Manual
Page 171
SimplIQ
Software Manual
The Position Reference Generator
MAN-SIMSW (Ver. 1.4)
11-30
Synchronizing several drives, which may be driven by an auxiliary encoder signal.
Each of the drives uses its ECAM table to derive its own motion path from the
auxiliary signal.
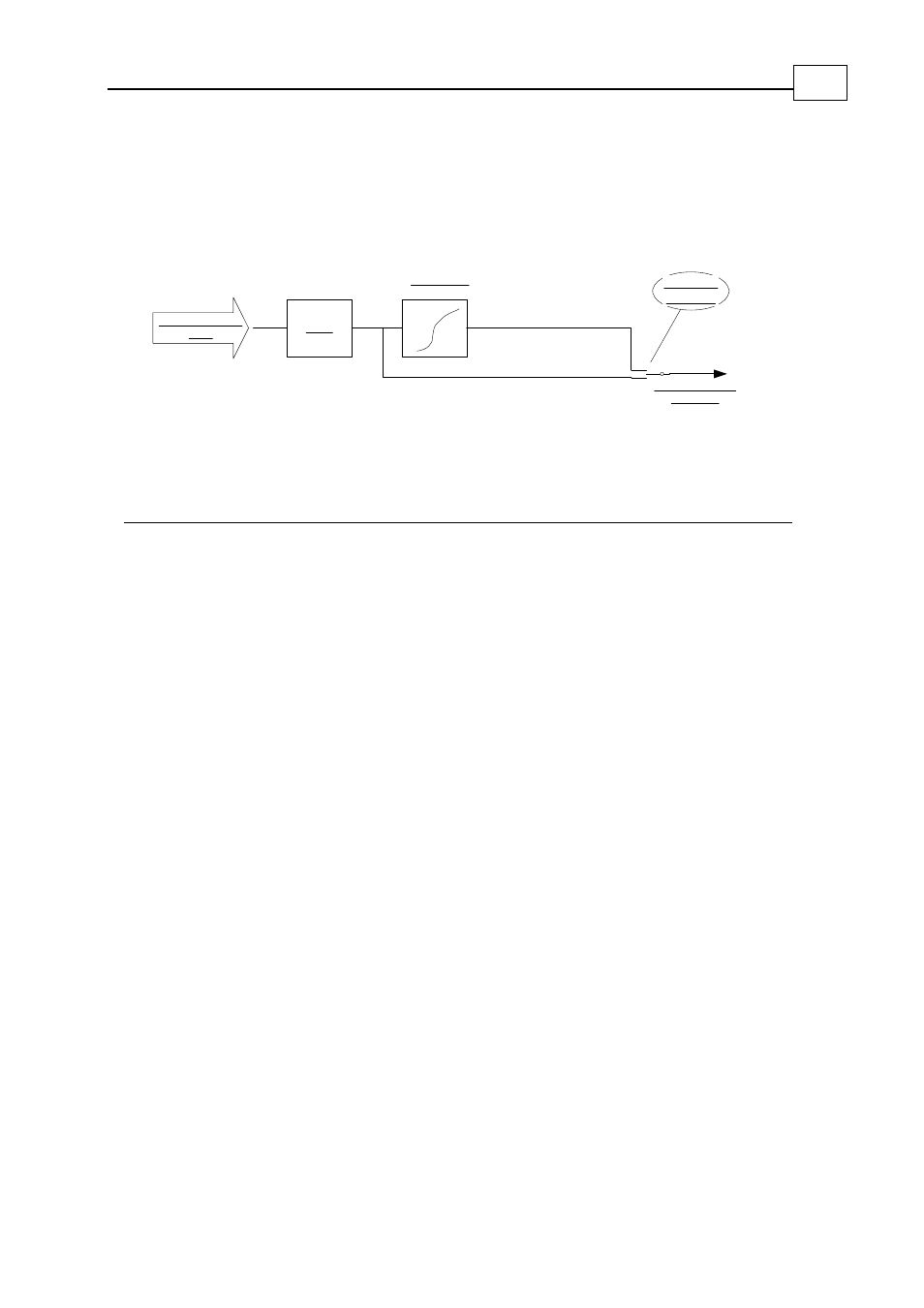
The external position reference is generated by the following scheme:
Auxiliary encoder
input
Auxiliary position
command
FR[3]
ECAM table
Use ECAM
if EM[1]>0
DV[6]
Figure
11-13: External Position Reference Generator
The following parameters determine the composition of the position reference:
Parameter Action
FR[3]
Scale the auxiliary encoder input. Applicable only if the auxiliary
encoder is not used for position feedback.
EM[1]
Define whether the ECAM table transforms the external reference:
EM[1]=0: Do not use ECAM table.
EM[1]=1: Use linear ECAM table to transform external command.
EM[1]=2: Use cyclical ECAM table to transform external command.
RM
Define whether an external reference is used:
RM=0: Do not use external reference.
RM=1: Use external reference.
DV[6]
Reads the external position reference.
Table
11-9: Position Reference Parameters
11.2.1 Follower
In Follower mode (RM=1, EM[1]=0), the external speed command tracks the auxiliary
encoder speed at a ratio of FR[3], as depicted in
. In this figure, the auxiliary
encoder counts PY modulo in the range [0…500]. The derived external position reference
advances at the same rate as the auxiliary encoder while FR[3]=1. Jumps in PY due to the
modulo count are not reflected in auxiliary position reference DV[6]. When FR[3] changes
to 2, DV[6] advances at twice the speed of PY.