3 stop manager, 1 general description, 3 stop manager -40 – ElmoMC SimplIQ Software Manual User Manual
Page 181: General description -40, Simpliq
SimplIQ
Software Manual
The Position Reference Generator
MAN-SIMSW (Ver. 1.4)
11-40
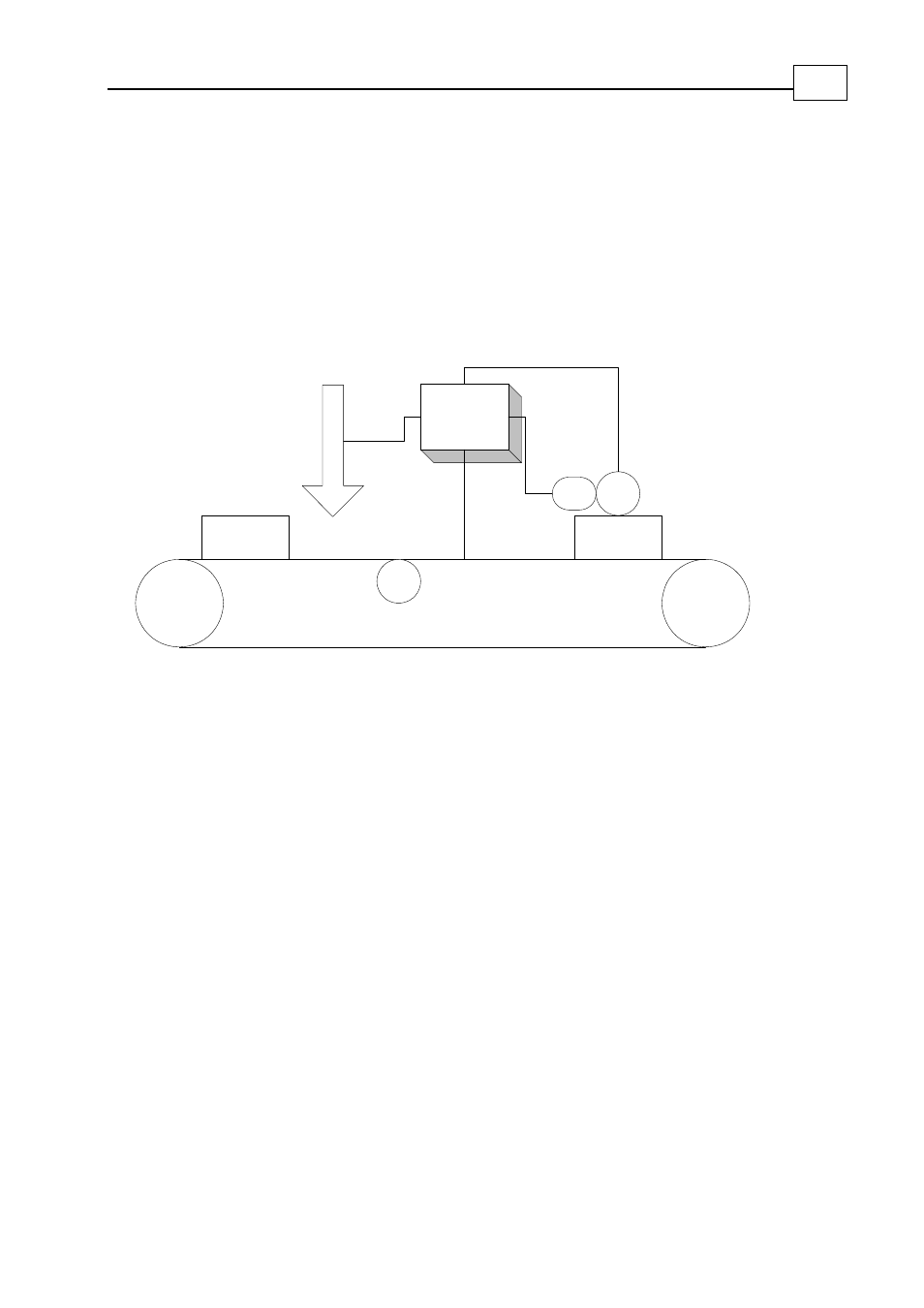
Example:
Consider a manipulator that works a conveyor. Whenever a box arrives, the roller prints
a label on the box. The roller turns continuously at the following line speed:
FR[3] = (counts per roller revolution) / (conveyor encoder counts/mm*2*π*r(mm)).
In order to print the label in the correct place, the roller position must be zero at the point
in which the sensor senses the next box. When a new box arrives, it homes the auxiliary
encoder to read zero.
At the time of auxiliary homing (when a new box arrives at the sensor), the external
reference jumps by PY*FR. The software command to the roller jumps in parallel by
-PY*FR, so that the roller continues to turn normally.
Programming the ##AUTO_HM routine as:
function AUTO_HM()
PA=0;BG;
return
will position the roller phased correctly with respect to the next box.
11.3 Stop Manager
11.3.1 General Description
The stop manager block as the following functions:
Stops the motion upon sensing a Stop switch, or upon sensing an RLS or FLS limit
switch.
Protects against discontinuity in the controller command. A discontinuity may occur
due to:
A switch that abruptly stops the motion.
An application error (an absolute motion mode such as PVT is started with
unacceptable initial conditions).
Next box
box
Conveyer speed encoder
Painting roller
Am plifier
Auxiliary
encoder
input
Feedback encoder input
Motor
Sensor
Auxiliary
hom e