Simpliq – ElmoMC SimplIQ Software Manual User Manual
Page 152
SimplIQ
Software Manual
The Position Reference Generator
MAN-SIMSW (Ver. 1.4)
11-11
The four parameters a, b, c and d are unknown and can be solved using the following
four linear equations:
P(t
0
) = P0, namely, d = P0
V(t
0
) = V0, namely, c = V0
P(t
0
+ T) = PT, namely, PT = aT
3
+ bT
2
+ cT + d
V(t
0
+ T) = VT, namely, VT = 3aT
2
+ 2bT + c
Example 2:
This example demonstrates how very few points can accurately describe a smooth and
long motion path.
Two drives, driven synchronously, draw an ellipse. One drive drives the x-axis and the
other drives the y-axis. The long axis of the ellipse is 100,000 counts long and the short
axis of the ellipse is 50,000 counts long. The entire ellipse is to be traveled within 2.2
seconds.
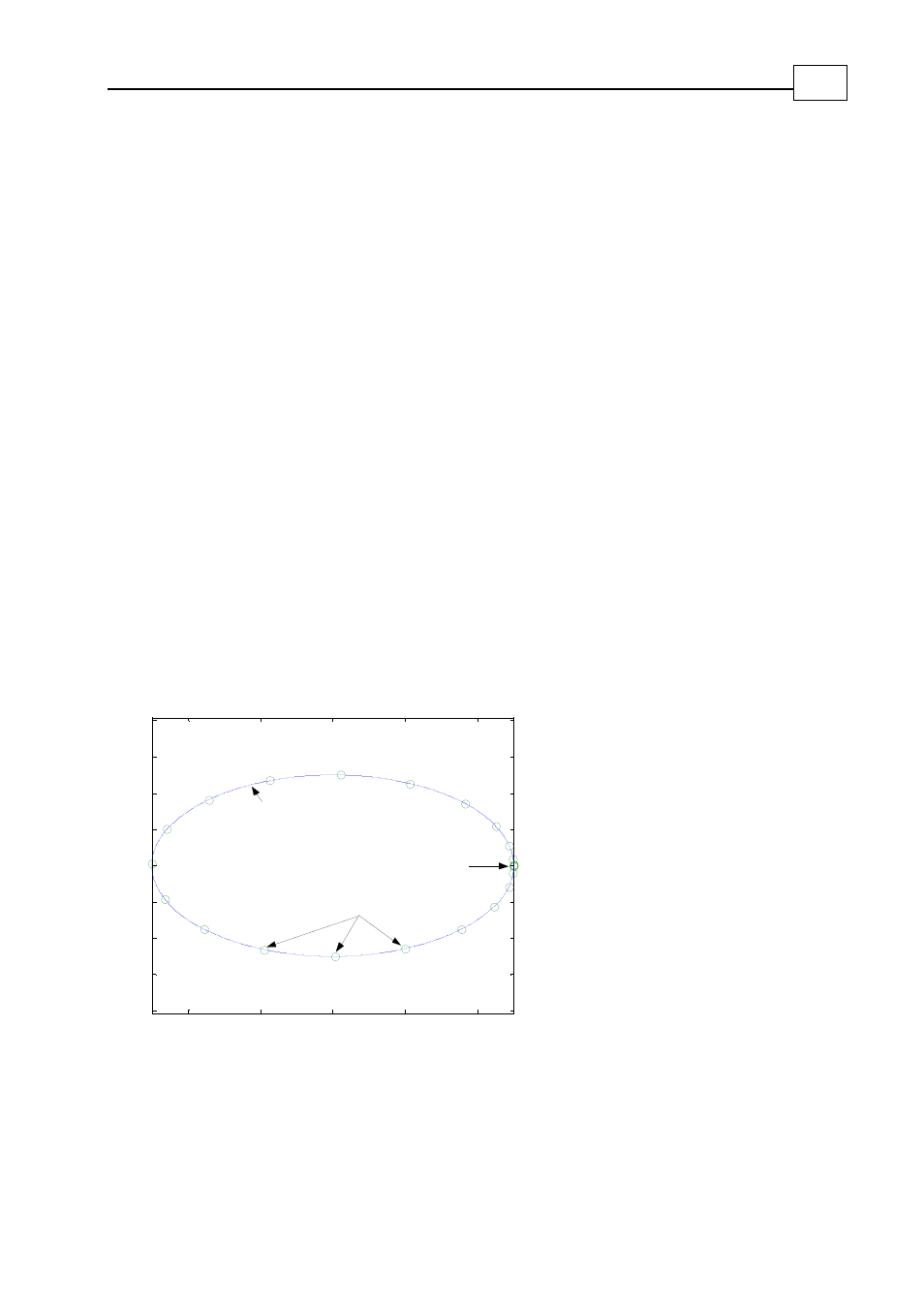
A PVT motion is planned with a fixed inter-point time of 100 milliseconds. For the entire
ellipse, 23 points are sufficient, as depicted in the following figures. The motion is
planned so that the tangential speed is accelerated to a constant rate, and then
decelerated back to zero at the end of the ellipse. Near the starting point of the ellipse, the
speed is slow; therefore, the PVT points — which are equally spaced in time — are more
spatially dense in that area. The continuous line in the following figure depicts the true
ellipse along with the ellipse generated by the drive by interpolating the PVT points.
The original ellipse and the drive interpolation of the PVT points are so close that they
cannot be differentiated on the plot, as seen in the following depiction of the ellipse.
-4
-2
0
2
4
x 10
4
-4
-3
-2
-1
0
1
2
3
4
x 10
4
Nominal ellipse
E llipse P V T points
Motion starts and teminates here
The following figure takes a closer look at the error between the true ellipse and the
drive-interpolated path.