Simpliq – ElmoMC SimplIQ Software Manual User Manual
Page 157
SimplIQ
Software Manual
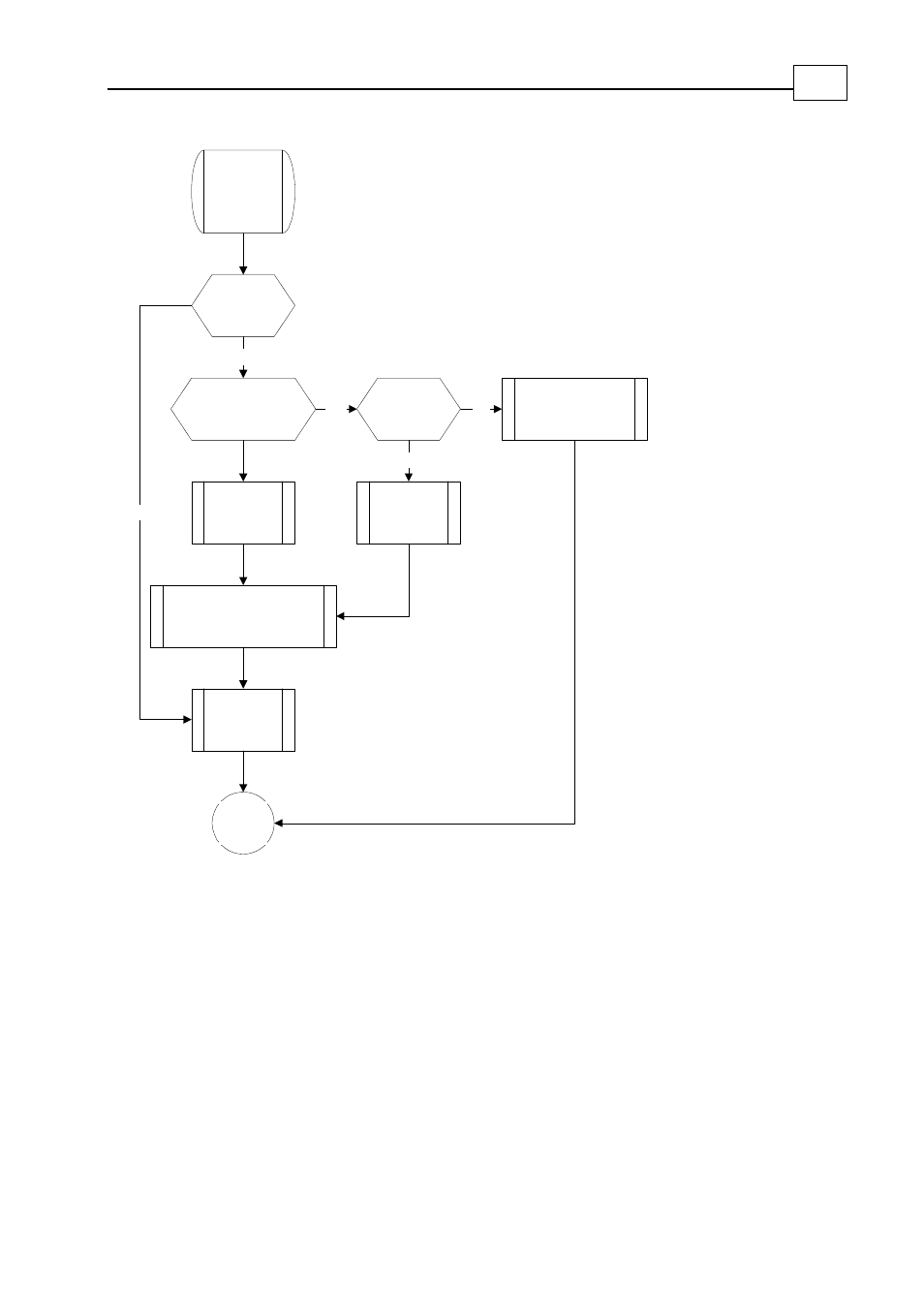
The Position Reference Generator
MAN-SIMSW (Ver. 1.4)
11-16
Motion
segment
completed
?
N >= MP[2]-1
Increment
read pointer
Read the N+1 row of the PVT
table and calculate the
parameters of the next motion
segment
Initial
conditions:
PVT read
pointer equals
N
Interpolate
position
command
Go to
position
controller
MP[3]==1
Exit PVT mode:
Set Stop motion,
using the SD
deceleration
Set the read
pointer to
MP[1]
Yes
No
Yes
Yes
No
Figure
11-5: PVT Decisions Flowchart
The host must know how much free place is available in the PVT table in order to
continue programming and executing PVT motion. This is achieved most efficiently by
tracking the table read and write pointers. The host is aware of the write table status,
because it controls writing to the table. If there is a doubt, the host can query MP[6]. The
PV command is used to query the read pointer.
The read and write pointers can be mapped to a synchronous PDO, so that a CAN master
can efficiently and continuously stay informed about the status of multiple drives
running PVT in parallel in a network. Rather than polling the status of the PVT motion
continuously, the host can use the queue underflow CAN emergency object as a request
to refill the PVT table.