Simpliq, Rv ] 1 [ pl – ElmoMC SimplIQ Software Manual User Manual
Page 126
SimplIQ
Software Manual
The Current Controller
MAN-SIMSW (Ver. 1.4)
9-3
Do not specify
M
B
R
V
]
1
[
PL
>
where:
V
B
is the DC motor supply voltage.
R
M
is the motor resistance.
You should define a PL[1] small enough so that at peak current there is enough voltage to
drive current changes. Otherwise, at large currents, the drive speed of response will be
limited by voltage saturation.
The continuous current limit for your application is programmed by CL[1]. This
parameter cannot exceed MC/2, because greater continuous currents could cause drive
overheating.
To avoid motor overheating, you can set CL[1] < MC/2.
As a recommendation, you should select PL[1] and CL[1] to be as great as the drive and
application permit. This will extend the linear range of the drive to its maximum and
thereby optimize the servo parameters.
The parameters PL[1] and CL[1] specify limits for the current demand. At
transients, the motor current may exceed PL[1] and CL[1] due to overshooting.
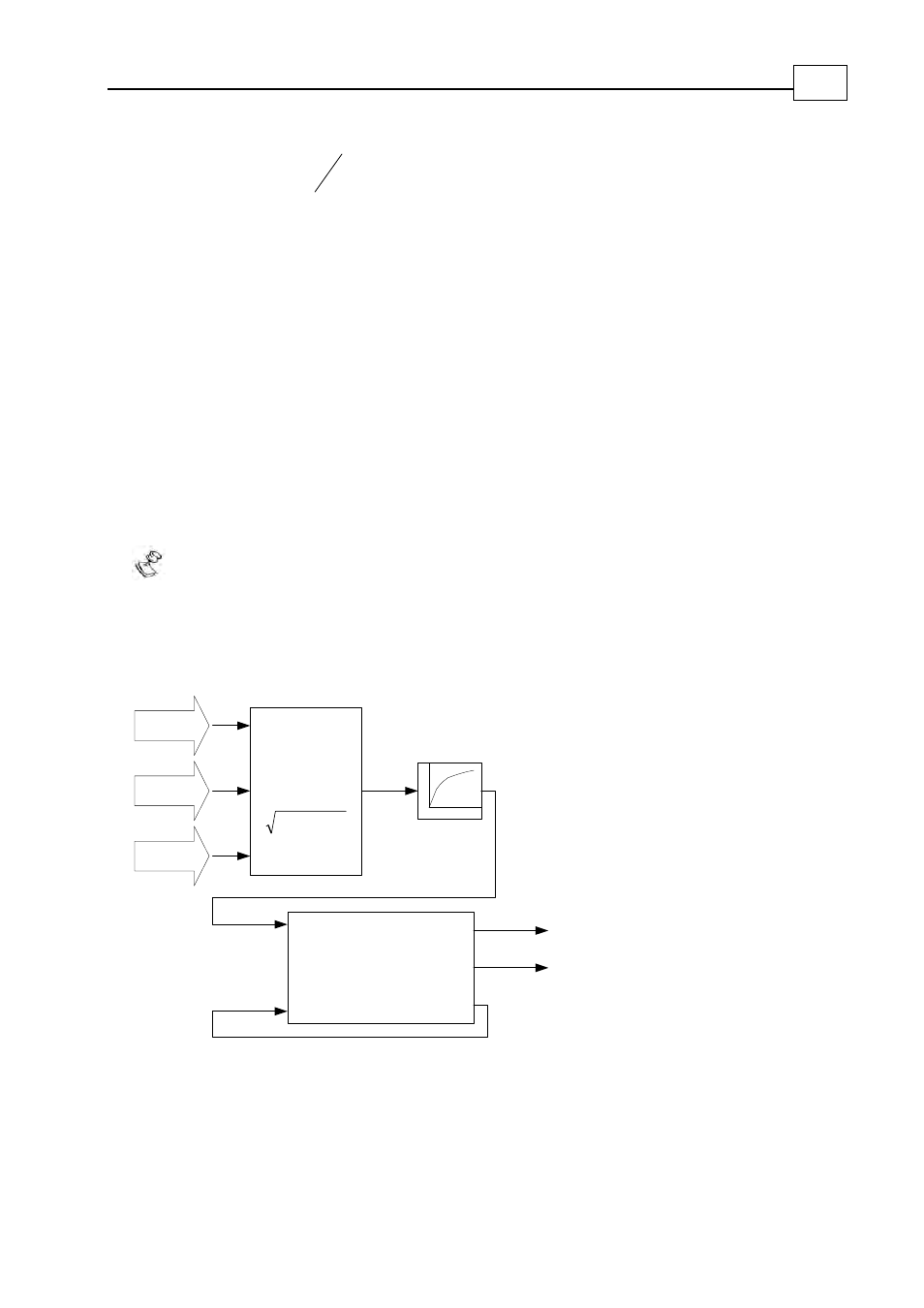
The decision to limit the motor current demand to CL[1] or to PL[1] is made by the drive
in real time. The LC flag reports the current limiting status. The decision mechanism is
depicted as follows:
-
Ic
Ib
Ia
RMS
2
c
2
b
2
a
I
I
I
+
+
If RMS > THOLD, then
LIMIT=CL[1]
THOLD=0.9CL[1]
LC=1
else
LIMIT=PL[1]
THOLD=CL[1]
LC=0
THOLD
LIMIT (CL[1] or PL[1])
RMS
Low Pass filter
Filtered RMS current
LC
Figure
9-2: Peak/Continuous Current Limit Selection
When the current limit switches, the comparison threshold (named THOLD in Figure
9-2), changes slightly. This hysteresis prevents frequent switching of the current limit.