4 point-to-point (ptp), 1 basic ptp, Point-to-point (ptp) -4 – ElmoMC SimplIQ Software Manual User Manual
Page 145: Simpliq
SimplIQ
Software Manual
The Position Reference Generator
MAN-SIMSW (Ver. 1.4)
11-4
Example:
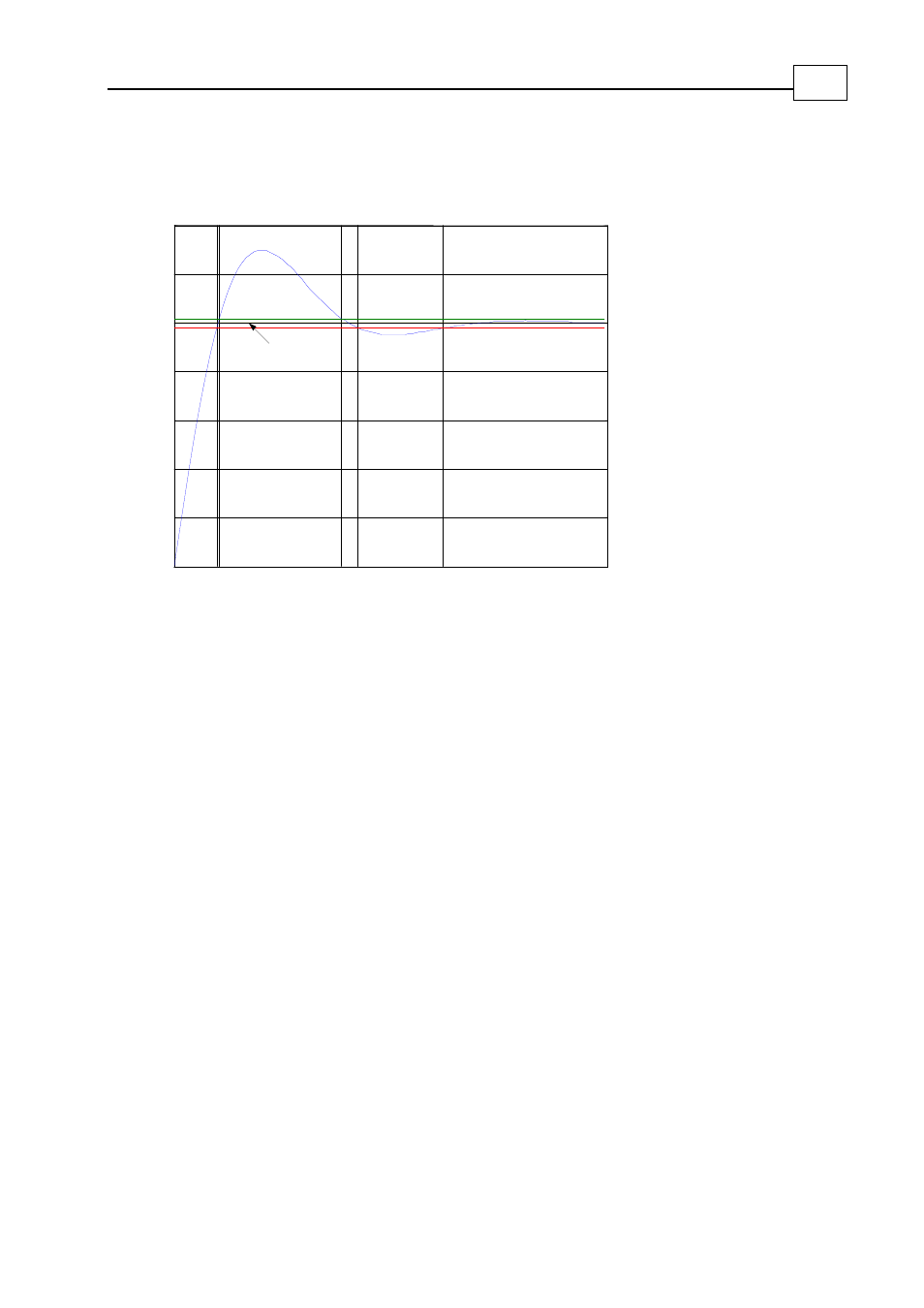
The concepts of target time and target radius are demonstrated in the following figure.
0.011 0.012
0.046
0.050
0.074
0
200
400
600
800
1000
1200
1400
Target
Time
Figure
11-1: Target Time and Target Radius
In this figure, the motor position settles after overshooting the target of 1000 counts.
The target radius is 20. The motor position is within the target radius in the range of
[980…1020] counts.
Considering the dynamics of the example, it is reasonable to select the target time
TR[2]=30. If too low a value is selected for TR[2], false “on-target” decision may result.
For example, if the target time is set at 3 milliseconds, a final stabilization will be
concluded at the time of 0.049 seconds, because during the time interval [0.046…0.049],
the motor was within the allowed position error of [980…1020] counts.
11.1.4 Point-to-Point (PTP)
11.1.4.1 Basic PTP
In this motion mode, the motor moves from its present position to a final point at zero
speed, and stays there. The trajectory to the final point is calculated based on speed,
acceleration and deceleration limits, as set by the AC, DC and SP parameters
respectively.
The largest PTP motion available is (XM[2] - XM[1])/2, because with modulo calculation,
the PTP motion always goes the short way around. For example, if XM[1]=-500 and
XM[2]=500, the present position reference is 490 and the command PA= -490. When BG is
entered, the position reference increases and goes through 499 to -500, and then to -490.
The total length of the movement will be 20 counts.