3 home return – IAI America RCA2-SD4N User Manual
Page 84
10. Notes on Operation
76
10.3 Home Return
10.3.1 Home Return Operation
(1) RA2AC, RA2AR
[1] The actuator moves to the parameter direction set as the operational direction in the home
return command.
[2] It detects the mechanical end with the software in the home return operation.
[3] After reversed at the end point, determines the point where Z-phase signal is detected as the
datum point.
[4] Furthermore, it moves in the offset amount set in the parameter and this point becomes the
origin point.
The number of motor revolutions after the actuator hits the stopper till Z-phase signal is generated
is already adjusted before the shipment.
The distance where it stops at the origin point after the slider hit the stopper then start reversing is
2mm in standard.
(2) RN3NA, RN3N, RN4NA, RN4N, RP3NA, RP3N, RP4NA, RP4N, GS3NA, GS3N, GS4NA,
GS4N, GD3NA, GD3N, GD4NA, GD4N, SD3NA, SD3N, SD4NA, SD4N
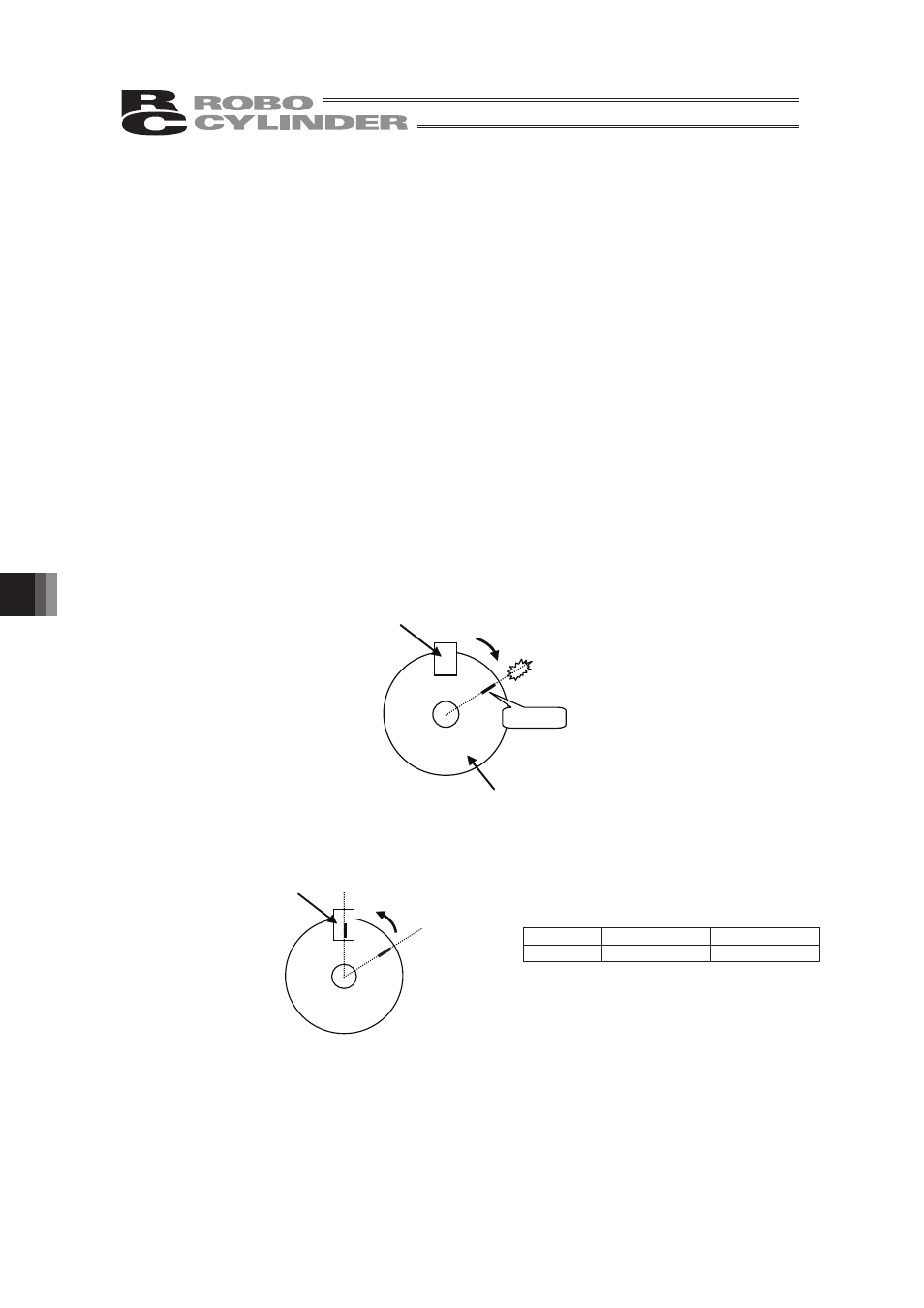
[1] As the motor turns, the rod returns to the negative side (actuator frame side) and contacts the
mechanical stopper.
Phase-Z detection sensor (fixed side)
Phase Z
Mechanical stopper
Encoder disk (rotating side)
[2] The rod reverses and turns by rotating angle a to find encoder phase Z.
Phase-Z detection sensor (fixed side)
Rotating angle α
The distance from the mechanical stopper to the
position where phase Z is detected is as follows.
Lead
1mm
2mm, 4mm, 6mm
Distance
0.5mm
0.8mm