Siemens MICROMASTER 420 User Manual
Page 83
Issue 07/04
3 Functions
MICROMASTER 420 Operating Instructions
6SE6400-5AA00-0BP0
83
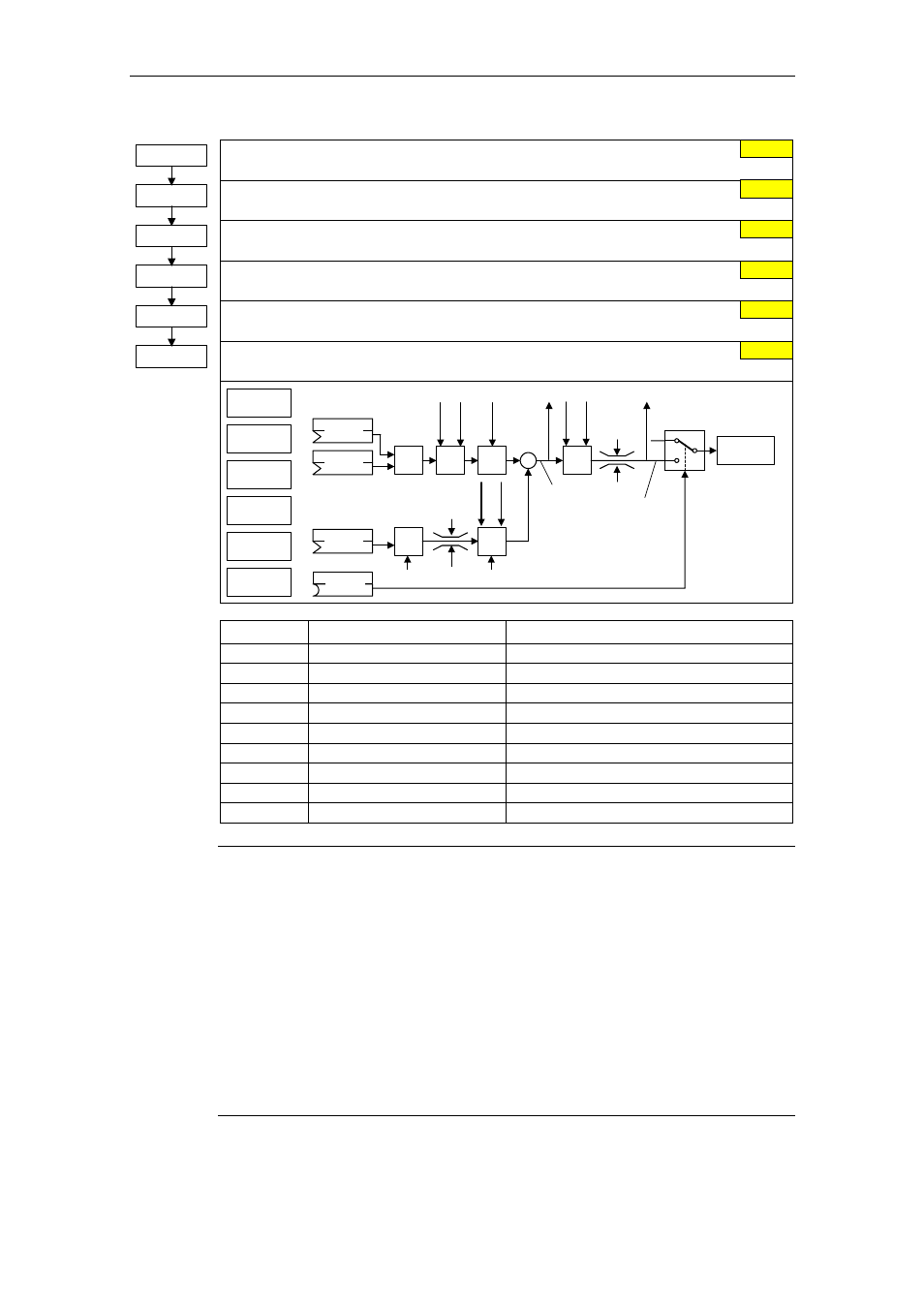
P2267 =...
Max. value for PID feedback
Sets the upper limit for the value of the feedback signal in [%]
P2268 =...
Min. value for PID feedback
Sets lower limit for value of feedback signal in [%]
P2280 =...
PID proportional gain
Allows user to set proportional gain for PID controller
P2285 =...
PID integral time
Sets integral time constant for PID controller
P2291 =...
PID output upper limit
Sets upper limit for PID controller output in [%]
P2292 =...
PID output lower limit
Sets lower limit for the PID controller output in [%]
PID
MOP
ADC
PID
SUM
PID
PID
FF
USS
BOP link
USS
COM link
CB
COM link
P2254
P2253
PID
RFG
PID
PT1
− ∆
PID
P2200
P2264
PID
PT1
PID
SCL
Output
PID
0
1
Motor
control
P
2257
P
2258
P
2261
P2271
P
2269
P
2270
P2265
P2280
P2285
P2268
P2267
P2292
P2291
r2273
r2294
Example:
Parameter Parameter
text
Example
P2200
BI: Enable PID controller
P2200 = 1.0
PID controller active
P2253
CI: PID setpoint
P2253 = 2224 PID-FF1
P2264
CI: PID feedback
P2264 = 755 ADC
P2267
Max. PID feedback
P2267
Adapt to the application
P2268
Min. PID feedback
P2268
Adapt to the application
P2280
PID proportional gain
P2280
Determined by optimizing
P2285
PID integral time
P2285
Determined by optimizing
P2291
PID output upper limit
P2291
Adapt to the application
P2292
PID output lower limit
P2292
Adapt to the application
NOTE
If P0971 is used to start data save from the RAM to EEPROM, then after the data
has been transferred, the communications memory is re-initialized. This means that
communications via USS as well as also via the CB board are interrupted for the
time it takes to reset:
The connected PLC (e.g. SIMATIC S7) goes into stop
The STARTER start-up program buffers the communications failure
For the DriveMonitor start-up program, "NC" (not connected) or "drive busy" is
displayed.
The "busy" text is displayed at the BOP operator panel
After reset has been completed, for the start-up programs STARTER and
DriveMonitor and the BOP operator panel, communications are automatically re-
established.
100.00 %
0.00 %
3.000
0.000 s
100.00 %
0.00 %