Dc braking, Compound braking, Vdc controller – Siemens MICROMASTER 420 User Manual
Page 82: Pid controller
3 Functions
Issue 07/04
MICROMASTER 420 Operating Instructions
82
6SE6400-5AA00-0BP0
DC braking
P1232 =...
DC braking current
(entered in %)
Defines level of DC current in [%] relative to rated motor current (P0305).
P1233 =...
Duration of DC braking
(entered in s)
Defines duration for which DC injection braking is to be active following an OFF1 or OFF3
command.
Compound braking
P1236 =...
Compound braking current
(entered in %)
Defines DC level superimposed on AC waveform after exceeding DC-link voltage threshold
of compound braking. The value is entered in [%] relative to rated motor current (P0305).
(see also 0).
Compound braking switch-on level
P0210
2
13
.
1
V
2
1.13
U
mains
DC_Comp
⋅
⋅
=
⋅
⋅
=
If P1254 = 0 :
1242
r
0.98
U
DC_Comp
⋅
=
Compound braking switch-on level
otherwise :
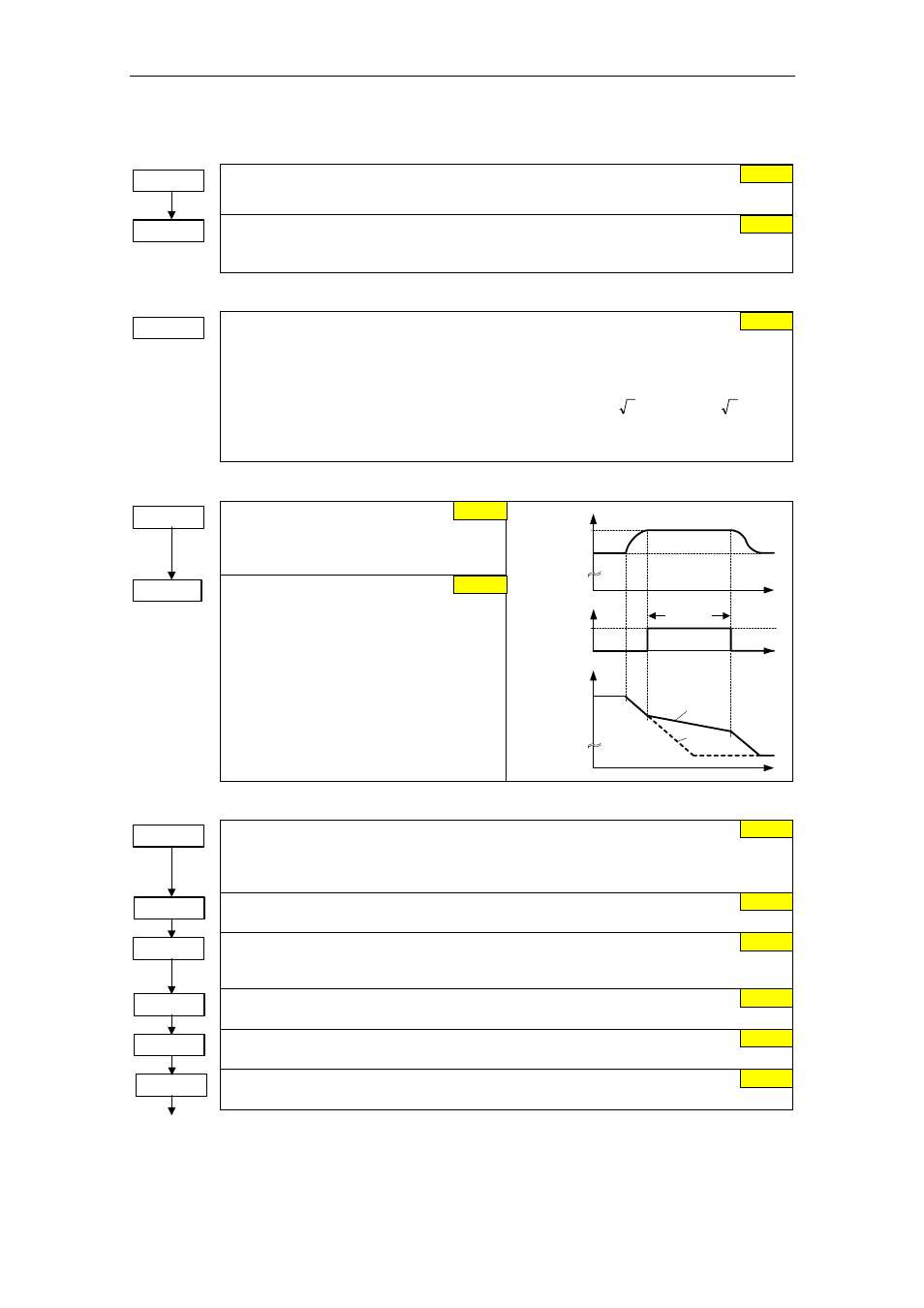
Vdc controller
P1240 =...
Configuration of Vdc controller
Enables / disables Vdc controller.
0 Vdc controller disabled
1 Vdc-max controller enabled
P1254 =...
Auto detect Vdc switch-on levels
Enables/disables auto-detection of switch-on
levels for Vdc control functionalities.
0 Disabled
1 Enabled
t
t
f
1
-controller active
V
DC_max
t
V
DC
0
r0056 Bit14
r1242
A0911
f
f
act
set
PID controller
P2200 =...
BI: Enable PID controller
PID mode Allows user to enable/disable the PID controller. Setting to 1 enables the PID
controller. Setting 1 automatically disables normal ramp times set in P1120 and P1121 and
the normal frequency setpoints
P2253 =...
CI: PID setpoint
Defines setpoint source for PID setpoint input
P2254 =...
CI: PID trim source
Selects trim source for PID setpoint. This signal is multiplied by the trim gain and added to
the PID setpoint
P2257 =...
Ramp-up time for PID setpoint
Sets the ramp-up time for the PID setpoint
P2258 =...
Ramp-down time for PID setpoint
Sets ramp-down time for PID setpoint
P2264 =...
CI: PID feedback
Selects the source of the PID feedback signal.
100 %
0 s
0 %
1
1
0.0
0.0
0.0
1.00 s
1.00 s
755.0