How to use the console – Panasonic MINAS A4P Series User Manual
Page 88
88
How to Use the Console
When you keep on pressing + , the motor rotates continuously in a positive direction while pressing it.
When you keep on pressing + , the motor rotates continuously in a negative direction while pressing it.
The rotation speed can be set by16.Pr41 (jog speed [high]).
When you press during rotation, the rotation speed changes to a jog speed (low speed).
Definition of positive or negative direction of rotation depends on the setting of 16.Pr50 (operating direction setting).
“Error” is shown when execution is made during an operation by I/O etc.
When you press , teaching is completed and you will be moved to the parameter number selection.
If you do not want to store a current position in a parameter, press after finishing teaching.
When you press , the motor rotates by specified travel in a positive direction.
When you press , the motor rotates by specified travel in a negative direction.
The travel can be set by 16.Pr48 (teaching travel setting).
The rotation speed can be set by16.Pr40 (jog speed [low]).
When you press during movement, the motor decelerates and stops.
When you keep on pressing , the motor rotates continuously in a positive direction while pressing it.
When you keep on pressing , the motor rotates continuously in a negative direction while pressing it.
The rotation speed can be set by16.Pr40 (jog speed [low]).
When you press during rotation, the rotation speed changes to a jog speed (high speed).
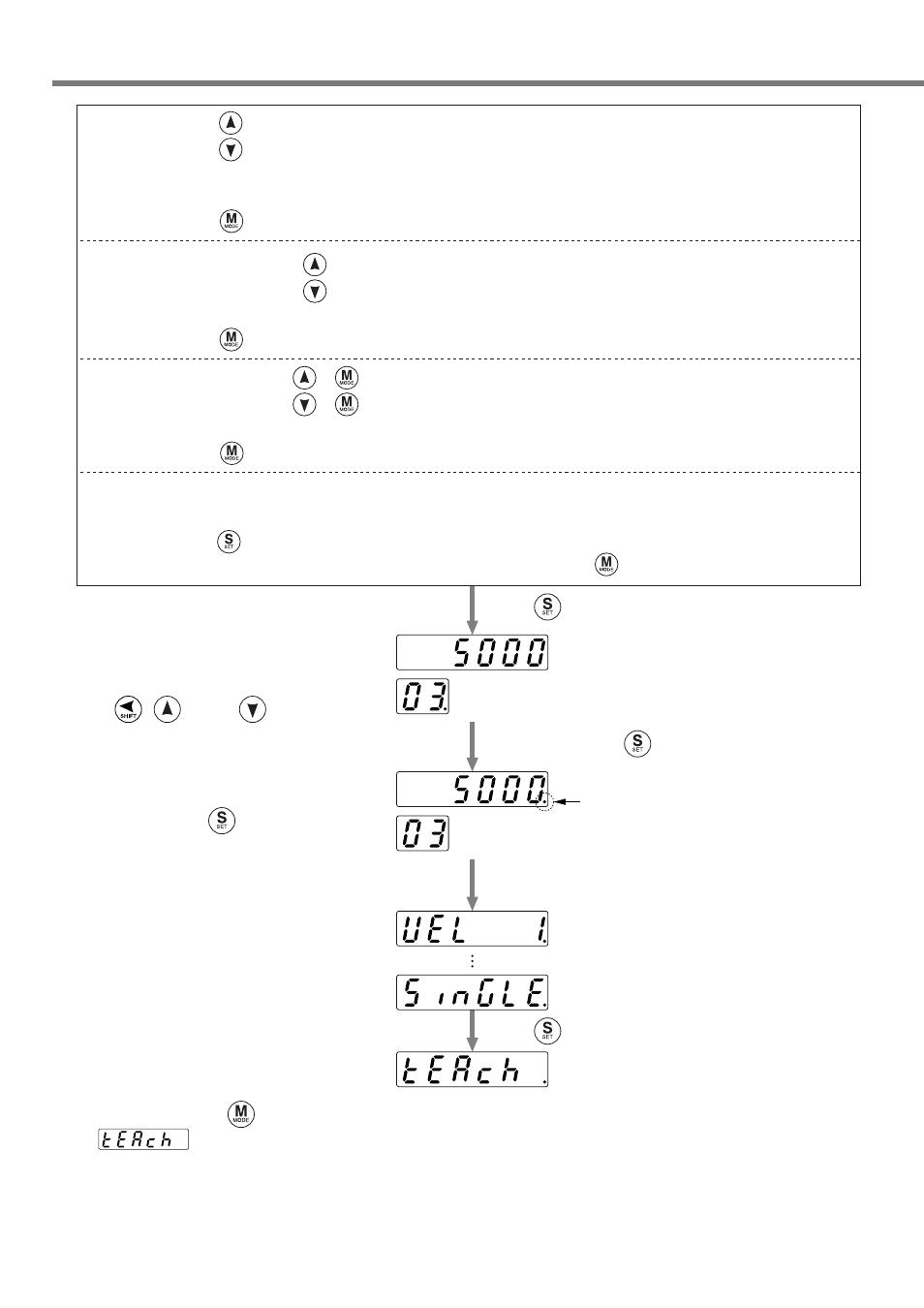
.....Current position (low order)
.....Point number
• Parameter number selection
To store a current position, set
a relevant point number using
, and/or .
Press .
Press .
A dot moves to the left.
.....Point number
• Target position setting
Select a point number and keep
on pressing . A current
position is set in a selected
parameter and you will be moved
to the speed number selection.
Keep on pressing .
* When you press during parameter setting, any parameter in process is not changed and is
shown again.
* When you set a target position by teaching, an operation mode fixed to the absolute value mode.
* If you set a target position manually when the servo turns off or main power supply turns off, set
SV.Pr67 and SV.Pr69 to “Deviation counter clear”.
* When you have set the parameters, write the parameters into EEPROM. If you turn the power supply
off before writing the parameters into EEPROM, those parameters are cleared.
.....Speed number selection
.....Block selection
• Step parameter setting
For the setting of the speed number
selection – block selection,
refer to “Step Parameters” on
page 92.