Limit sensor + z phase, Homing operation, Caution – Panasonic MINAS A4P Series User Manual
Page 120
120
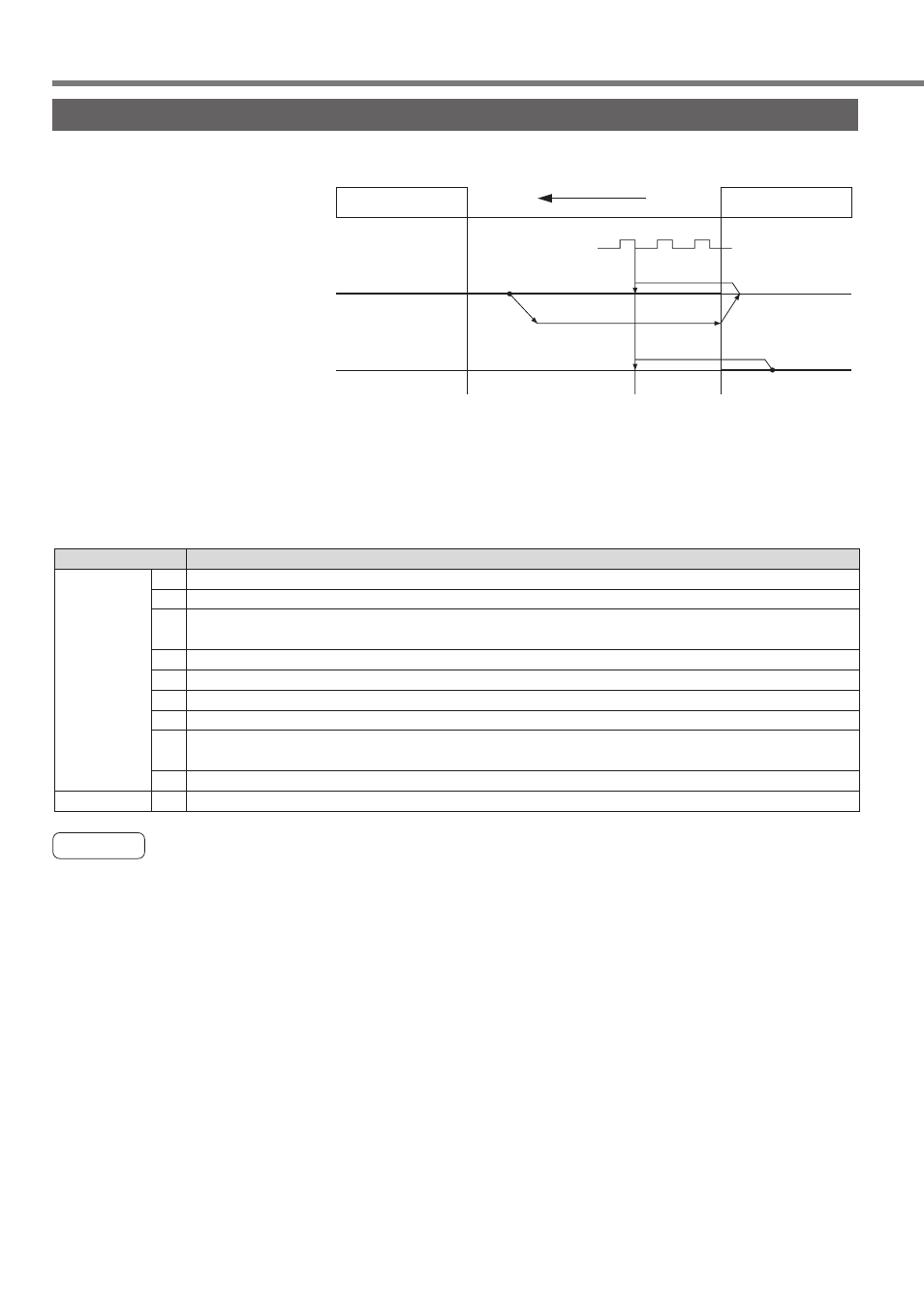
Homing Operation
Detect the home sensor and the limit sensor in a reverse direction, not in a direction of homing, by 16.Pr30
(Homing speed (high)), decelerate, and stop. After that, detect the limit sensor turning off in a direction of
homing by 16.Pr31 (Homing speed (low)), count the Z phase specified times by 16.Pr3B (homing Z phase
count setting) and define that point as a home position.
(1) A starting point is at any place
other than on the negative limit
sensor
Positive direction
limit sensor
Negative direction
limit sensor
Direction of homing
Z phase
L-SPD
L-SPD
H-SPD
(2) A starting point is on the negative
limit sensor
Caution
1) If any of the set values of the parameters below is “0”, an operation trips due to homing error protection
(error code No. 68) and stops according to an operation at alarm occurrence.
• 16.Pr30 (Homing speed (high))
• 16.Pr31 (Homing speed (low))
• 16.Pr33 (Homing acceleration setting)
• 16.Pr34 (Homing deceleration setting)
2) Also, if the over-travel inhibit input is enabled in an operating direction under any of the conditions below
during homing, an operation trips due to homing error protection (error code No. 68) and stops according
to an operation at alarm occurrence.
• A limit sensor in a traveling direction has been detected during detection of specified count of Z phase
How to decelerate at the detection of a limit sensor depends on the settings of SV.Pr55 (Over-travel
inhibit input operation setting). (For a set value = 0 or 2, deceleration-and-stop. For a set value = 1 or 3,
stop in the deceleration time “0”.)
3) We would like to ask you to design so that a sensor signal does not vary (beyond the sensor signal width)
when the motor is decelerating after it detects the limit sensor.
4) We would like to ask you to design so that the Z phase of the motor does not turn on near the Z phase
detection start position (L-SPD out of the negative limit sensor area in a figure shown above). The number
of Z phase counts may vary.
Description
Specify the high speed for the homing operation (0 to 6000 r/min).
Specify the low speed for the homing operation (0 to 6000 r/min).
Specify the offset operation speed if the home offset operation is performed (0 to 6000 r/min). For the home
offset operation, refer to page 124.
Specify the acceleration for the homing operation in a range between 0 to 3000 r/min.
Specify the deceleration for the homing operation in a range between 3000 to 0 r/min.
Specify an operating direction for the homing. (0: positive direction, 1: negative direction)
Specify a type of homing. ([3]: Limit sensor + Z phase)
Specify whether or not to perform the home offset operation. (0: Not perform, 1: Perform) For the home offset
operation, refer to page 124.
Specify the Z phase that an operation stops. ([3] (the 3rd Z phase) in this example)
Specify the home offset (–2147483647 to 2147483647 pulses). If the home offset is not required, specify “0”.
16.Pr**
32.Pr**
30
31
32
33
34
35
36
37
3B
01
Parameter number
• Parameters related to this operation
Limit Sensor + Z phase
Example: Z phase count = 3 at an operation in a positive direction