Example of absolute operation setting, Operation setting, Caution – Panasonic MINAS A4P Series User Manual
Page 109
109
[Operation Setting]
Operation
Setting
VEL1
ACC1
DEC1
16.Pr**
00
10
12
Parameter name
Positioning setting first speed
Positioning acceleration setting 1st
Positioning deceleration setting 1st
• Setting of 16-bit positioning parameter
Incremental operation (Incremental)
1000000
VEL1
ACC1
DEC1
Single
01
Operation mode
Position/Waiting time
Speed
Acceleration Deceleration
Block
No.
• Setting of step parameter
1. Set the 16-bit positioning parameter in the table above to any value and specify the step parameter
as shown below.
2. Perform homing. (Refer to “Homing” on page 114.)
3. Specify the point 1 when the servo turns on and connect the strobe signal input (STB: CN X5 Pin 24)
to COM–. Then, an operation starts.
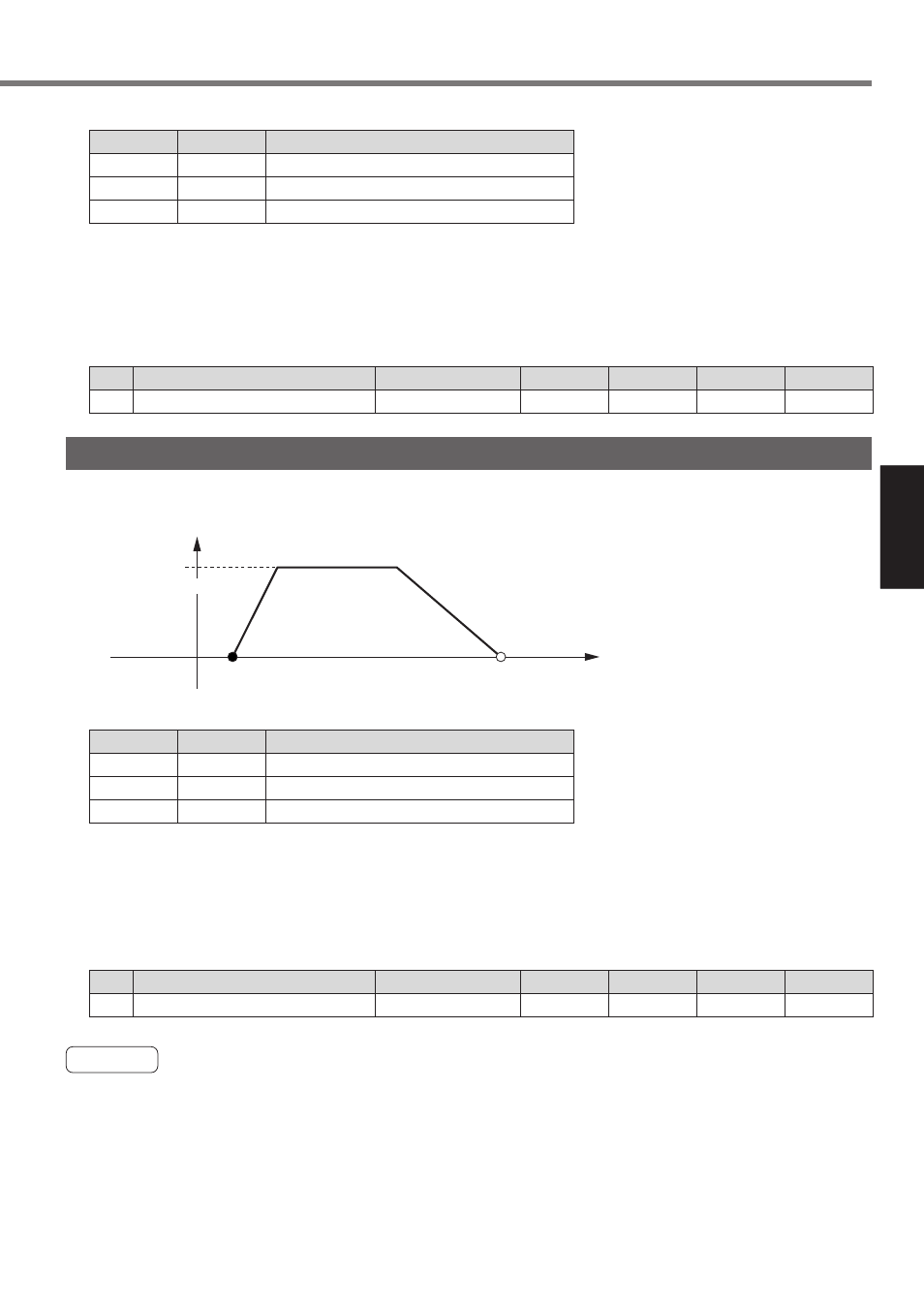
Example of Absolute Operation Setting
In the absolute operation, the motor operates regarding a set value as absolute position based on origin = “0”.
The chart below shows an example to specify the point 1 to the absolute operation for movement.
Speed = VEL1
Origin = 0
Speed
Deceleration = DEC1
Time
End position = Point 1 set value
(+1000000)
Start position = X
VEL1
ACC1
DEC1
16.Pr**
00
10
12
Parameter name
Positioning setting first speed
Positioning acceleration setting 1st
Positioning deceleration setting 1st
• Setting of 16-bit positioning parameter
1. Set the 16-bit positioning parameter in the table above and specify the step parameter as shown
below.
2. Perform homing. (Refer to “Homing” on page 114.)
3. Specify the point 1 when the servo turns on and connect the strobe signal input (STB: CN X5 Pin 24)
to COM–. Then, an operation starts.
• Setting of step parameter
Absolute operation (Absolute)
1000000
VEL1
ACC1
DEC1
Single
01
Operation mode
Position/Waiting time
Speed
Acceleration Deceleration
Block
No.
Acceleration =
ACC1
Caution
1) Wrap around
If 16.Pr51 (wrap around accepted) is set to “1”, although an error does not occur when wrap around
happens, an absolute position cannot be guaranteed. If you will combine the absolute operation mode
and incremental operation mode with each other, take care not to cause the wrap around or do not use the
absolute operation.