Gain adjustment, Purpose, Procedures – Panasonic MINAS A4P Series User Manual
Page 142
142
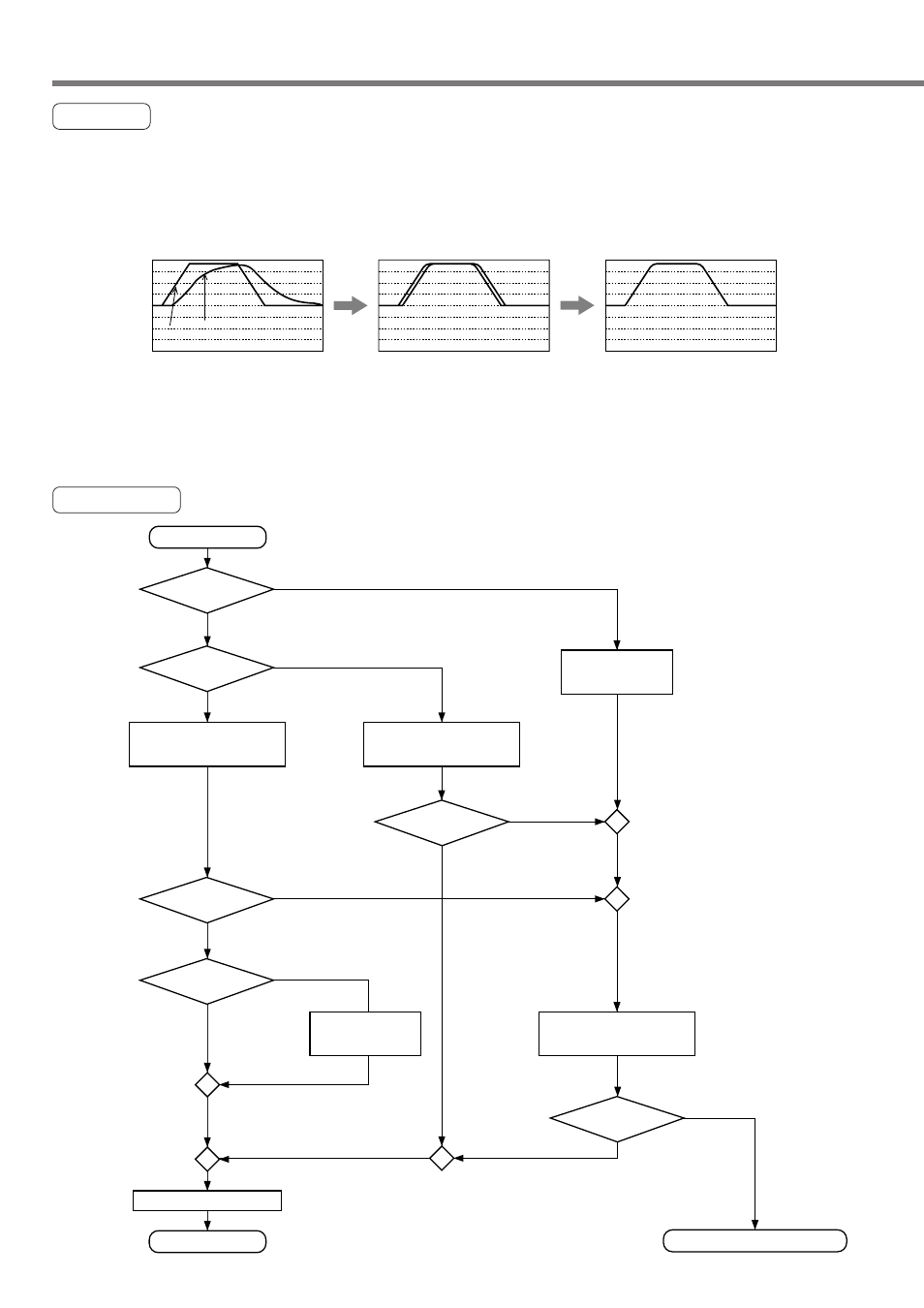
Position loop gain
: 20
Velocity loop gain
: 100
Time constant of
V-loop integration
: 50
Velocity loop feed forward : 0
Inertia ratio
: 100
Position loop gain
: 100
Velocity loop gain
: 50
Time constant of
V-loop integration
: 50
Velocity loop feed forward : 0
Inertia ratio
: 100
Position loop gain
: 100
Velocity loop gain
: 50
Time constant of
V-loop integration
: 50
Velocity loop feed forward : 500
Inertia ratio
: 100
+2000
-
2000
0
0.0
375
250
125
0.0
375
250
125
0.0
375
250
125
[r/min]
Command Speed
Motor actual speed
Gain setup : Low
Gain setup : High
Gain setup : High + feed forward setup
Start adjustment
Automatic
adjustment ?
Ready for
command
input ?
Action O.K.?
Action O.K.?
Yes
Yes
Action O.K.?
Real time
auto-gain tuning
(Default)
Normal mode
auto-gain tuning
Release of
auto-adjusting
function
Manual gain tuning
Finish adjustment
Writing to EEPROM
Consult to authorized dealer
(see P.144)
(see P.148)
(see P.151)
(see P.152)
No
No
Load
characteristics
vary?
Yes
No
Yes
No
No
No
Yes
Yes
Release of
auto-
adjusting
function
(see P.151)
Gain Adjustment
Purpose
It is required for the servo driver to run the motor in least time delay and as faithful as possible against the
commands from the host controller. You can make a gain adjustment so that you can run the motor as
closely as possible to the commands and obtain the optimum performance of the machine.
Procedures