When in trouble, 3) cautions, 4) example of movement – Panasonic MINAS A4P Series User Manual
Page 171
171
[When in Trouble]
When in
T
roub
le
Motor
Load
Motor
movable
range
Err34 occurrence range
Err34 occurrence range
SV.
Pr26
SV.
Pr26
Motor
Load
Motor movable range
Position command
input range
SV.
Pr26
SV.
Pr26
Err34 occurrence range
Err34 occurrence range
Motor
Load
Motor movable range
Position command
input range
Err34 occurrence range
Err34 occurrence range
SV.
Pr26
SV.
Pr26
3) Cautions
• This function is not a protection against the abnormal position command.
• When this software limit protection is activated, the motor decelerates and stops according to SV.Pr68
(Error response action).
The work (load) may collide to the machine end and be damaged depending on the load during this
deceleration, hence set up the range of SV.Pr26 including the deceleration movement.
• This software limit protection will be invalidated during the trial run and frequency characteristics func-
tioning of the PANATERM
®
.
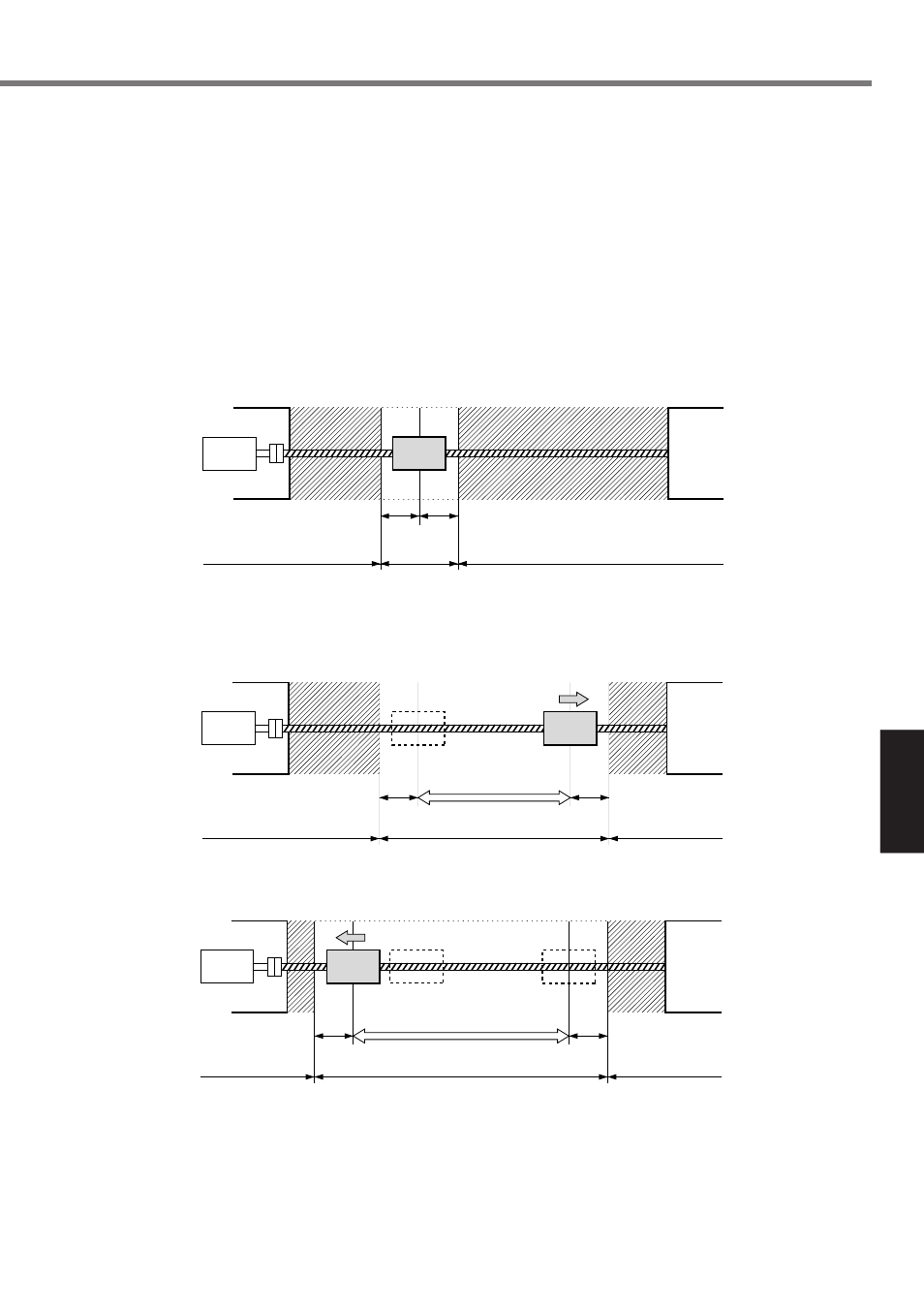
4) Example of movement
(1) When no position command is entered (Servo-ON status),
The motor movable range will be the travel range which is set at both sides of the motor with SV.Pr26
since no position command is entered. When the load enters to the Err34 occurrence range (oblique
line range), software limit protection will be activated.
(2) When the load moves to the right (at Servo-ON),
When the position command to the right direction is entered, the motor movable range will be ex-
panded by entered position command, and the movable range will be the position command input
range + SV.Pr26 setups in both sides.
(3) When the load moves to the left (at Servo-ON),
When the position command to the left direction, the motor movable range will be expanded further.
5) Condition under which the position command input range is cleared
The position command input range will be 0-cleared under the following conditions.
• When the power is turned on.
• When the homing is completed.
• At the starting and the finishing of the normal auto-gain tuning.