Point deviates / positioning accuracy is poor, Home position slips, Abnormal motor noise or vibration – Panasonic MINAS A4P Series User Manual
Page 173: When in trouble
173
[When in Trouble]
When in
T
roub
le
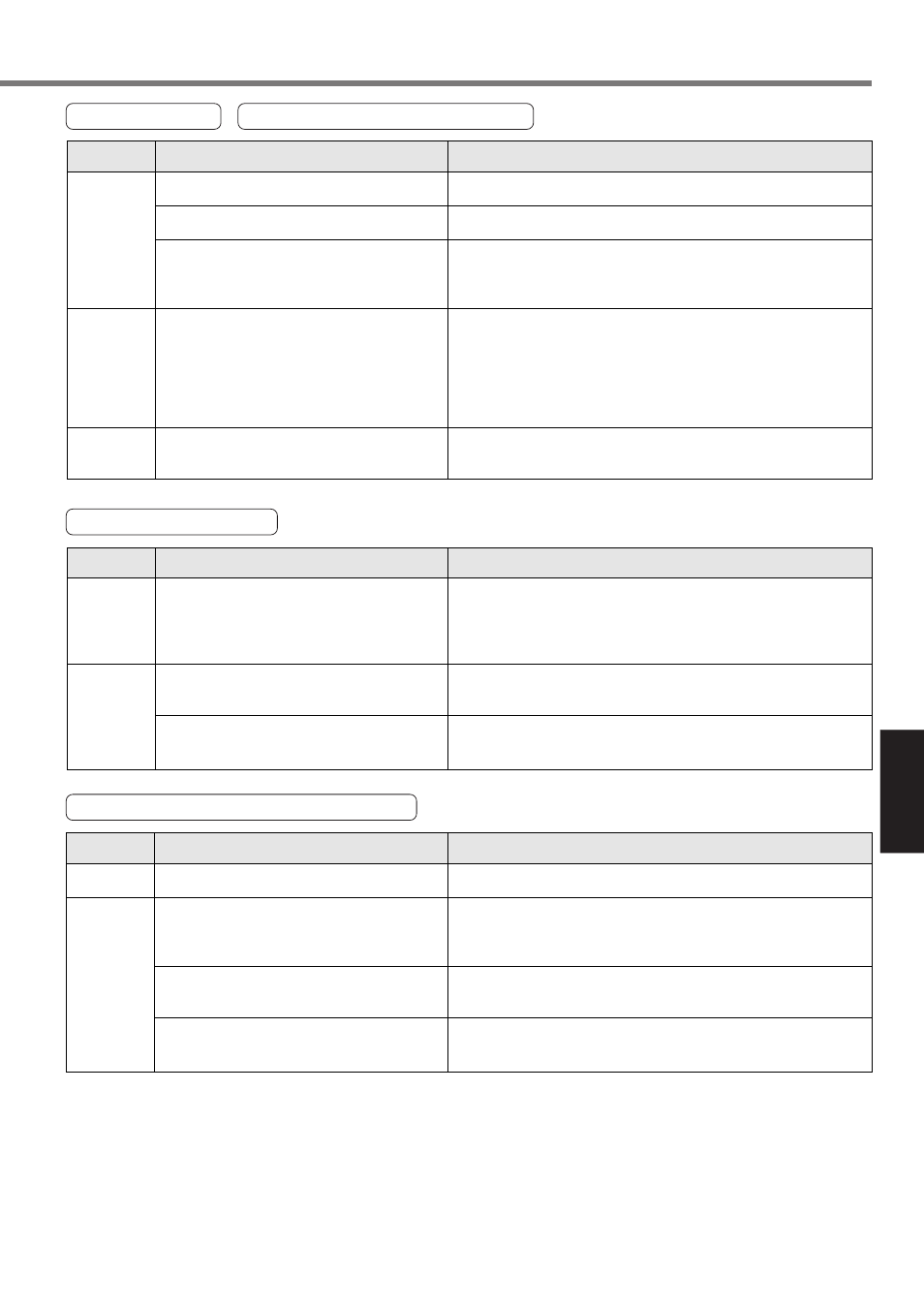
Point Deviates Positioning Accuracy is Poor
Home Position Slips
The setting of the parameter for positioning
operation is wrong.
The setting of positioning completion range is
large.
Position loop gain is small.
Each input signal of CN X5 is chattering.
1)Servo-ON signal
2)CW/CCW over-travel inhibit input
3)Multi function input 1/2
(when a stop command is set)
4)Strobe signal input
5)Point specifying input
Load inertia is large.
Adjust the target position parameter at each point.
Check the setting of an operation mode (relative travel/absolute travel).
Decrease the set value of the positioning completion range (SV.Pr60)
to the extent that chattering does not occur.
Check the position deviation in the monitor mode of the console or
“PANATERM
®
”.
Increase the set value of SV.Pr10 to the extent that oscillation does not
occur and check it.
Check the wiring and connection between each signal of the connector
CN X5 and COM–.
Check the overshoot when stopping with a graphic function of
“PANATERM
®
”. If this problem is not resolved by gain adjustment,
increase the motor and driver capacity.
Parameter
Wiring
Installation
Classification
Causes
Countermeasures
The homing speed is slow, if any of the homing
types below is used.
16.Pr36 =
1:Home sensor (based on the front end)
4: Limit sensor
Chattering of home sensor (Z-LS) input.
Noise is on the encoder line.
Review the set value of the homing speed (16.Pr30/31).
Check home sensor input signal of the controller with oscilloscope.
Review the wiring near to proximity dog and make a noise measure or
reduce noise.
Reduce noise (installation of noise filter or ferrite core), shield
treatment of I/F cables, use of a twisted pair or separation of power
and signal lines.
Parameter
Wiring
Classification
Causes
Countermeasures
Abnormal Motor Noise or Vibration
Gain setup is large.
Resonance of the machine and
the motor.
Motor bearing
Electro-magnetic sound, gear noise, rubbing
noise at brake engagement, hub noise or rub-
bing noise of encoder
Lower the gain by setting up lower values to SV.Pr11 and 19, of
velocity loop gain and SV.Pr10 and 18 of position loop gain.
Re-adjust SV.Pr14 and 1C (Torque filter). Check if the machine
resonance exists or not with frequency characteristics analyzing
function of the PANATERM
®
. Set up the notch frequency to SV.Pr1D
or SV.Pr28 if resonance exists.
Check the noise and vibration near the bearing of the motor while
running the motor with no load. Replace the motor to check. Request
for repair.
Check the noise of the motor while running the motor with no load.
Replace the motor to check. Request for repair.
Adjustment
Installation
Classification
Causes
Countermeasures