Operation setting, Caution – Panasonic MINAS A4P Series User Manual
Page 113
113
[Operation Setting]
Operation
Setting
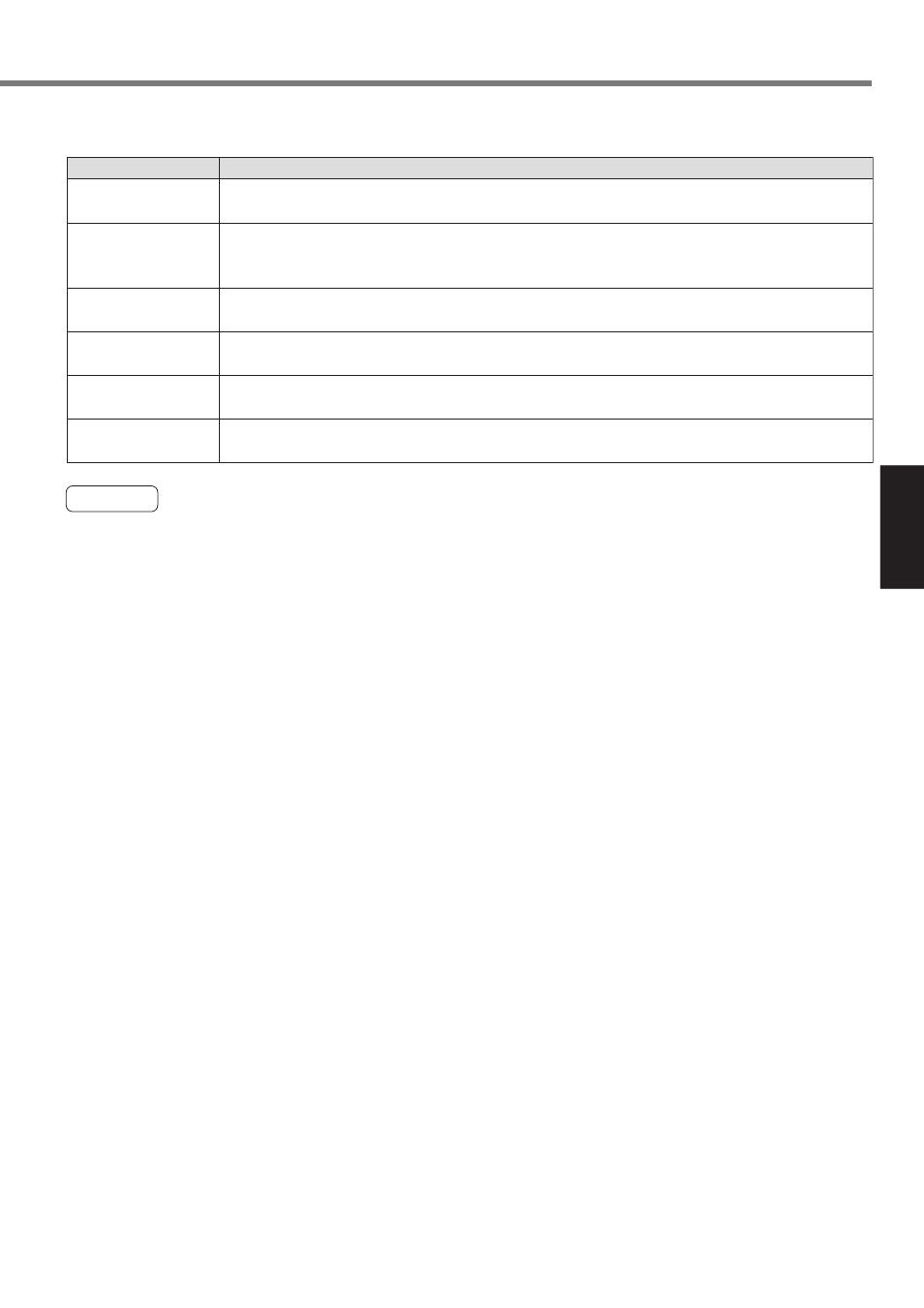
• Parameters related to jog operation
Set the parameters below when performing the jog operation.
Caution
1) If any of the set values of the parameters below is “0”, an operation trips due to undefined data error
protection (error code No. 69) and stops according to an operation at alarm occurrence.
• 16.Pr40 (Jog speed (low))
• 16.Pr41 (Jog speed (high))
• 16.Pr42 (Jog operation acceleration setting)
• 16.Pr44 (Jog operation deceleration setting)
2) If the current position (–2147483647 to 2147483647) overflows when the jog operation is performed
continuously in the same direction, an operation trips due to current position overflow error protection
(error code No. 70) and stops according to an operation at alarm occurrence. This error can be disabled
by 16.Pr51 (wrap around permission). In this case, however, an absolute position cannot be guaranteed.
If you disable the wrap around, use the incremental operation only.
3) If the over-travel inhibit input is enabled in an operating direction during the jog operation after homing has
completed, an operation trips due to over-travel inhibit detection error protection (error code No. 71) and
stops according to an operation at alarm occurrence. In the SV.Pr55 (Over-travel inhibit input operation
setting), you can specify whether or not to trip the deceleration operation. However, if the over-travel
inhibit input in the operating direction is enabled during the jog operation before homing completes, an
error does not occur although the motor complies with the deceleration pattern of SV.Pr55.
4) When the motor has exceeded a maximum travel specified by 32.Pr01 (Setting of maximum movement in
plus direction) and 32.Pr02 (Setting of maximum movement in minus direction) during the jog operation
after homing has completed, an operation stops due to maximum travel limit error protection (error code
No. 72) and stops according to an operation at alarm occurrence. However, the maximum travel limit error
protection does not work during the jog operation before homing completes.
5) For the jog operation by an external signal, high-speed normal rotation jog operation and high-speed
reverse rotation jog operation only can be executed. (If the console is used, low-speed normal rotation jog
operation and low-speed reverse rotation jog operation also can be performed.)
6) Even if you specify the high-speed normal rotation jog and high-speed reverse rotation jog in the multi
function input (EX-IN1 and EX-IN2) and turn ON the strobe signal input (STB) when both of EX-IN1 and
EX-IN2 turns ON, the motor does not work.
7) If the jog operation is stopped by a stop command (emergency stop, deceleration-and-stop or temporary
stop), the current position output (P1OUT to P3OUT) is not updated.
16.Pr**
40
41
42
43
44
45
Description
Specify the speed of low-speed jog operation (0 to 6000 r/min). Use this parameter only when
performing the jog operation from the console (optional). For details, refer to page 90.
Specify the speed of high-speed jog operation (0 to 6000 r/min). For the jog operation by point
specifying or multi function input (refer to procedure (2) on page 112), specify the jog speed using this
parameter.
Specify the acceleration for the jog operation. Available acceleration time is in a range between 0 and
3000 r/min.
Specify the S-shaped acceleration for the jog operation. Specify the S-shaped control time during
acceleration time (0 to 1000 r/min). For details, refer to page 131.
Specify the deceleration for the jog operation. Available acceleration time is in a range between 3000
and 0 r/min.
Specify the S-shaped deceleration for the jog operation. Specify the S-shaped control time during
deceleration time (0 to 1000 r/min). For details, refer to page 131.