Parameter setup – Panasonic MINAS A4P Series User Manual
Page 62
62
Parameter Setup
Standard default : < >
Servo
PrNo.
Setup
range
Unit
Title
Function/Content
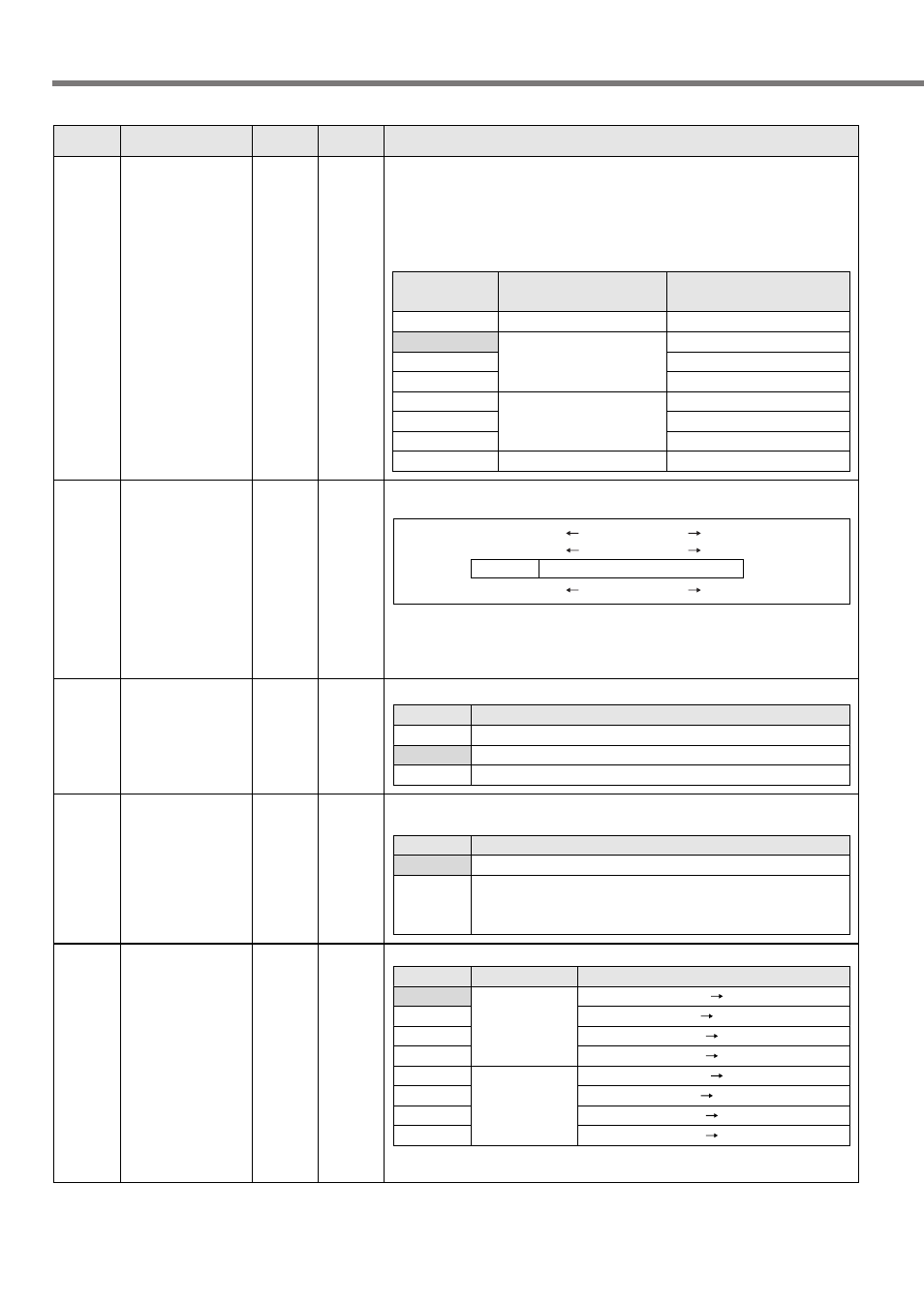
21
0 to 7
<1>
–
Real time auto
tuning set up
You can set up the action mode of the real-time auto-gain tuning.
With higher setup such as 3 or 6, the driver respond quickly to the change
of the inertia during operation, however it might cause an unstable
operation. Use 1 or 4 for normal operation.For the vertical axis application,
use with the setup of 4 to 6.
When vibration occurs at gain switching, set up this to "7".
Setup value
0
<1>
2
3
4
5
6
7
Real-time
auto-gain tuning
Invalid
Normal mode
Vertical axis mode
No gain switching
Varying degree of
load inertia in motion
–
Little change
Gradual change
Rapid change
Little change
Gradual change
Rapid change
Little change
24
0 to 2
<0>
–
Vibration
suppression filter
switching selection
You can select the switching method when you use the vibration
suppression filter.
25
0 to 7
<0>
–
Normal auto tuning
motion setup
You can set up the action pattern at the normal mode auto-gain tuning.
e.g.) When the setup is 0, the motor turns 2 revolutions to CCW and 2
revolutions to CW.
Setup value
<0>
1
2
3
4
5
6
7
Number of revolution
2 [revolution]
1 [revolution]
Rotational direction
CCW CW
CW CCW
CCW CCW
CW CW
CCW CW
CW CCW
CCW CCW
CW CW
23
0 to 2
<1>
–
Adaptive filter
mode
You can set up the action of the adaptive filter.
22
0 to 15
A to C-frame:
<4>
D to F-frame:
<1>
–
Machine stiffness
at auto tuning
You can set up the machine stiffness in 16 steps while the real-time auto-
gain tuning is valid.
well, and this may give impact to the machine. Increase the setup
gradually watching the movement of the machine.
low machine stiffness high
low servo gain high
low response high
SV.Pr22 0, 1- - - - - - - - - - - - 14, 15
Setup value
0
<1>
2
Content
Invalid
Valid
Hold (holds the adaptive filter frequency when this setup is changed to 2.)
Setup value
<0>, 1
2
Content
No switching (both of 1st and 2nd are valid.)
You can switch with the position command direction.
CCW : 1st damping filter selection (SV.Pr2B, 2C).
CW : 2nd damping filter selection (SV.Pr2D, 2E).