Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-III Communication Reference User Manual
Page 389
10 Appendix
10.1.3 MECHATROLINK-III Common Parameters
10-40
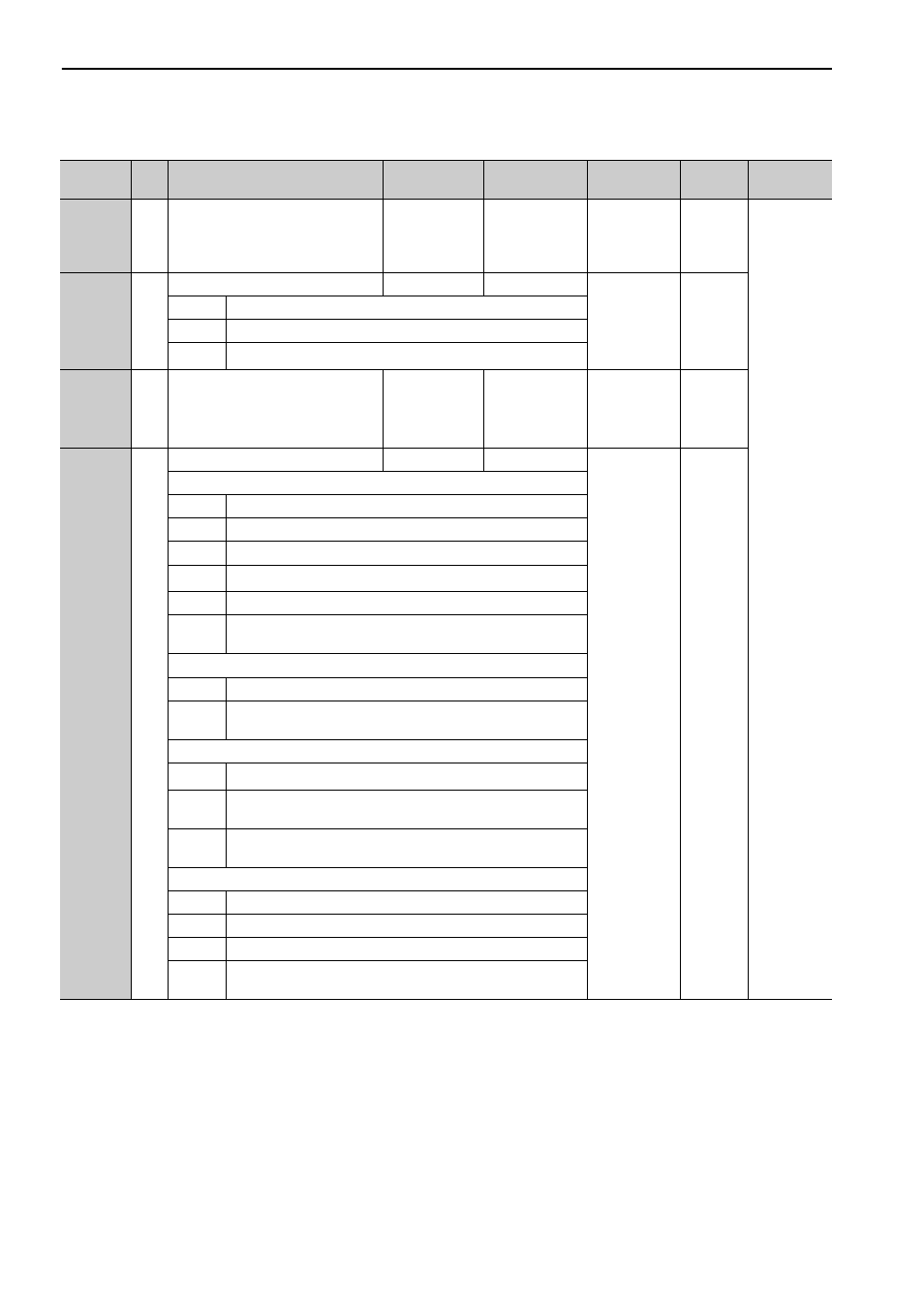
46
PnA8C
4
Acceleration Base Unit
(Set the value of “n” used as the
exponent in 10
n
when calculating
the Acceleration Unit (45).)
4 to 6
–
4
After
restart
Unit System
Related
Parameters
47
PnA8E
4
Torque Unit
1 to 2
–
1
After
restart
0000H
Not supported
0001H
Percentage (%) of rated torque
0002H
Max. torque/40000000H
*5
48
PnA90
4
Torque Base Unit
*5
(Set the value of “n” used as the
exponent in 10
n
when calculating
the Torque Unit (47).)
-5 to 0
–
0
After
restart
49
PnA92
4
Compliance Unit System (read only)
–
–
0601011FH
–
Speed
Bit 0
reference unit/s (1: Enabled)
Bit 1
reference unit/min (1: Enabled)
Bit 2
Percentage (%) of rated speed (1: Enabled)
Bit 3
min
-1
(rpm) (1: Enabled)
Bit 4
Max. motor speed/4000000H (1: Enabled)
Bit
5 to 7
Reserved (0: Disabled)
Position
Bit 8
reference unit (1: Enabled)
Bit
9 to 15
Reserved (0: Disabled)
Acceleration
Bit 16
reference unit/s
2
(1: Enabled)
Bit 17
msec (Acceleration time taken to reach the rated speed)
(0: Disabled)
Bit
18 to 23 Reserved (0: Disabled)
Torque
Bit 24
N m (N) (0: Disabled)
Bit 25
Percentage (%) of rated torque (1: Enabled)
Bit 26
Max. torque/40000000H (1: Enabled)
Bit
27 to 31 Reserved (0: Disabled)
∗5. When 0002H is selected for the Torque Unit (parameter 47), set the Torque Base Unit (parameter 48) to 0.
Note: When using parameters that are enabled after restarting the SERVOPACK, a CONFIG command must be input or
the power must be turned OFF and then ON again.
(cont’d)
Parameter
No.
Size
Name
Setting Range
Units
[Resolution]
Factory
Setting
When
Enabled
Classifica-
tion