Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-III Communication Reference User Manual
Page 319
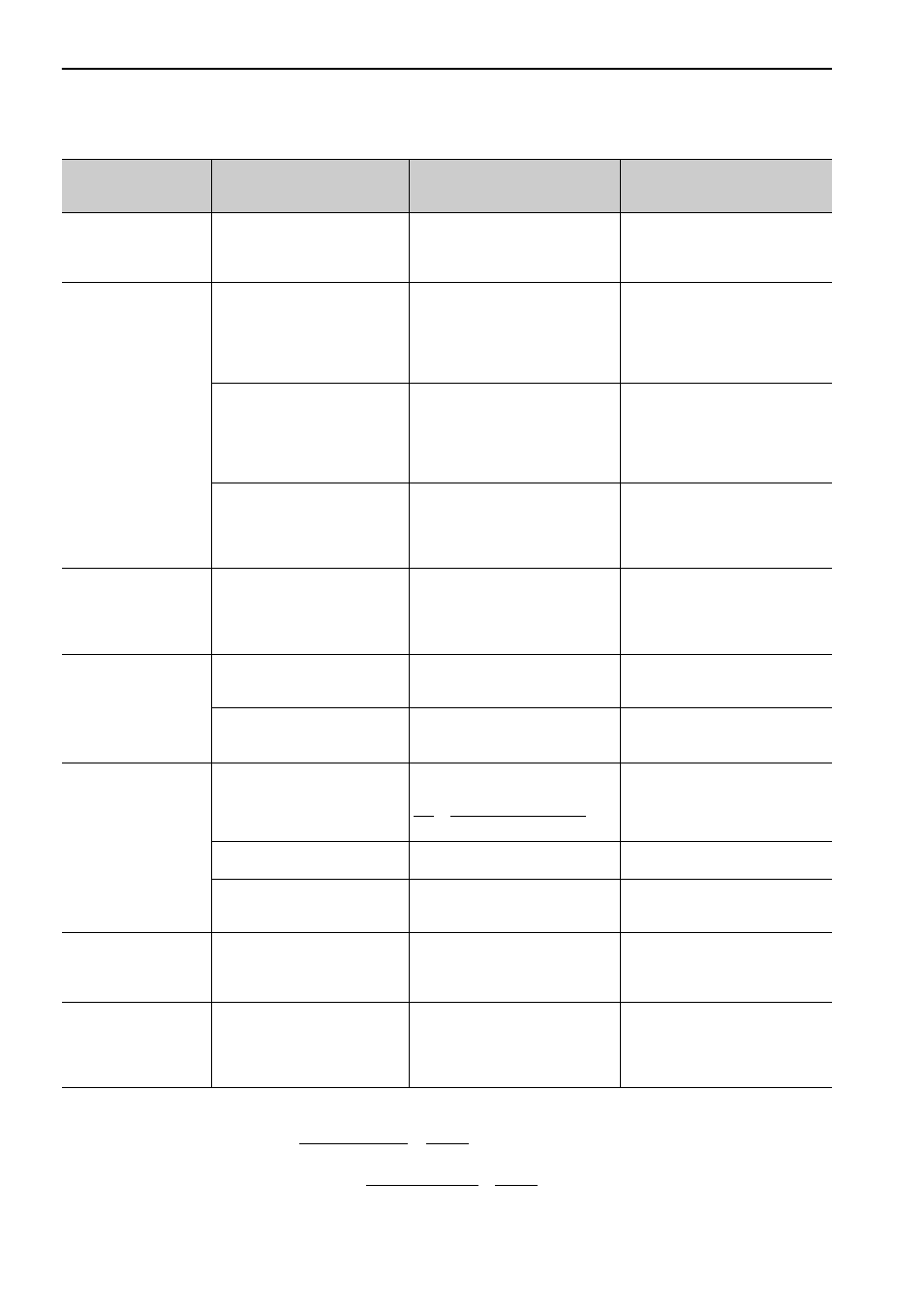
9 Troubleshooting
9.1.2 Troubleshooting of Alarms
9-8
A.041:
Encoder Output Pulse
Setting Error
The encoder output pulse (Pn212)
is out of the setting range and
does not satisfy the setting condi-
tions.
Check the parameter Pn212.
Set Pn212 to a correct value.
A.042:
Parameter
Combination Error
The speed of program JOG oper-
ation (Fn004) is lower than the
setting range after having
changed the electronic gear ratio
(Pn20E/Pn210) or the servomo-
tor.
Check if the detection conditions
*1
are satisfied.
Decrease the setting of the elec-
tronic gear ratio (Pn20E/Pn210).
The speed of program JOG oper-
ation (Fn004) is lower than the
setting range after having
changed the setting of the pro-
gram JOG movement speed
(Pn533).
Check if the detection conditions
*1
are satisfied.
Increase the setting of the program
JOG movement speed (Pn533).
The moving speed of advanced
autotuning is lower than the set-
ting range after having changed
the electronic gear ratio (Pn20E/
Pn210) or the servomotor.
Check if the detection conditions
*1
are satisfied.
Decrease the setting of the elec-
tronic gear ratio (Pn20E/Pn210).
A.044:
Semi-closed/Fully-
closed Loop Control
Parameter Setting
Error
The setting of the fully-closed
module does not match with that
of Pn002.3.
Check the settings of Pn002.3.
The setting of fully-closed module
must be compatible with the setting
of Pn002.3.
A.04A:
Parameter Setting
Error 2
For a 4-byte parameter bank, no
registration in two consecutive
bytes for two bank members.
–
Change the number of bytes for
bank members to an appropriate
value.
The total amount of bank data
exceeds 64. (Pn900
×
Pn901 >
64)
–
Reduce the total amount of bank
data to 64 or less.
A.050:
Combination Error
(The SERVOPACK and
servomotor capacities do
not correspond.)
The SERVOPACK and servomo-
tor capacities do not match each
other.
Check the capacities to see if they
satisfy the following condition:
Select the proper combination of
SERVOPACK and servomotor
capacities.
An encoder fault occurred.
Replace the servomotor and see if
the alarm occurs again.
Replace the servomotor (encoder).
A fault occurred in the SERVO-
PACK or converter.
−
The SERVOPACK or converter
may be faulty. Replace the SERVO-
PACK or converter.
A.051:
Unsupported Device
Alarm
An unsupported serial converter
unit, encoder, or external encoder
is connected to the SERVO-
PACK.
Check the product specifications,
and select the correct model.
Select the correct combination of
units.
A.0b0:
Cancelled Servo ON
Command Alarm
After executing the utility func-
tion to turn ON the power to the
motor, the servo ON command
(SV_ON) was sent from the host
controller.
−
Turn the SERVOPACK power sup-
ply OFF and then ON again or exe-
cute a software reset.
∗1. Detection conditions
If one of the following conditions detected, an alarm occurs.
•
•
(cont’d)
Alarm Number:
Alarm Name
(Alarm Description)
Cause
Investigative Actions
Corrective Actions
≤
Servomotor capacity
SERVOPACK capacity ≤
4
1
4
Pn533 [min
-1
]
×
6
× 10
5
Encoder resolution
≤
Pn20E
Pn210
Max Motor Speed [min
-1
]
×
About 3.66
× 10
12
Encoder resolution
≥
Pn20E
Pn210